Paso 3: Sensor de ultrasonidos HC-SR04


¿Es?
El sensor de ultrasonidos, es otro de los elementos muy usados en electrónica. Es un sensor se usa mucho en el ámbito de la robótica, en coches tele dirigidos y demás. Sensor de este, nos dice distancia hay entre el robot lleva el sensor y el objeto mas cercano esta enfrente. Por lo tanto, se usa para detectar objetos y poder, por ejemplo, esquivarlos.
Explicacion
Estos sensores, lo hacen, es enviar un pulso de infrarojo muy altas, inaudibles para el ser humano. Este pulso, rebota en el objeto cercano y el sensor lo vuelve a interceptar con ONU radiotelefonía apto para ello. Calculando el tiempo que ha pasado la onda en ir y volver, calculamos la distancia a la se encuentra el objeto.
La velocidad del ultrsonido en el aire es de 340 m/s, o lo es lo mismo 0,034 cm / microseg. Antes por la física que "distancia=velocidad/tiempo(microseg)", podemos saber la distancia a la se encuentra el objeto. Tendremos dividir ese resultado entre 2, pues ese seria el tiempo tarda el ultrasonido en ir y en volver.
El sensor ultrasondos usado, HC-SR04, tiene un rango de entre 2 cm a 300 cm con una resolucion permiso de 3 mm.
Conexiones
El sensor, tiene 4 patas, cada una con diferente nombre y diferente función. Pata de la alimentación del sensor de Vcc y GND hijo párr. La de "Gatillo" es por donde se envía el pulso, también llamada "Disparo". La pata de "Eco" es por donde vamos a recibir el ultrasonido después de haber rebotado en el objeto. Las conexiones usadas son las siguientes:
Sensor Arduino
---> VCC + 5V
Tierra---> GND
Trig---> Pin 8
Eco---> Pin 9
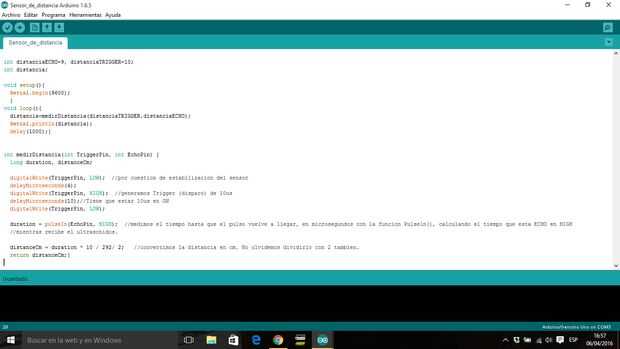
Podemos probar el sensor antes de usarlo en el programa principal con el programa que os dejado arriba y se enseña en la imagen. En este programa, se presenta la funcion "medirDistancia" despues Director de usado en el programa.
Esta función, lo de primero hace de cuestión de por dispositivo de sensor de la de la estabilizacion, poner es gatillo "Baja" durante 4 micro-segundos. Después generamos el pulso tiene ser mínimo de 10 micro-segundos. Con la función "PulseIn()" calculamos el tiempo del ultrasonido en ir y en volver. Para entender esta función, debemos saber el sensor cuando empieza a recibir el ultrasonido de vuelta, el pone pin eco en modo alto, hasta acaba el ultrasonido y lo vuelve a poner en modo bajo. Lo hace la función "Pulseln()" es calcular el tiempo de el pulso alto (Aunque también se podría configurar para un pulso bajo), y devuelve ese tiempo en micro-segundos. Finalmente, solamente tenemos aplicar la contribución usada (10/292 = 0,034) y ya tendríamos la distancia.










")

")