Paso 5: Los controladores de motor
Aquí está la lista de componentes electrónicos:
- 4 x motores Nema 17
- 3 tarjetas de conductor x A4988
- conectores de paso 2,54 2 pines (conectores hembra y cabezales. Utilice Relimate o Molex KK 254)
- 12V, 3A fuente de alimentación
- tiras de berg de la echada de 2.54 milímetros (macho y hembra)
- condensadores de 3 x 100uF/25V
- R3 de Arduino Genuino/Uno
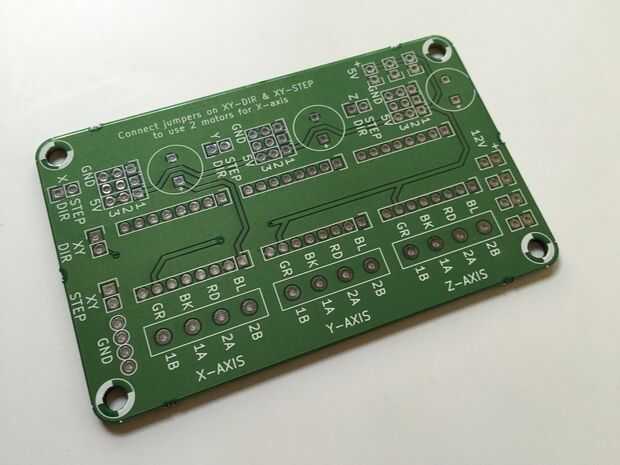
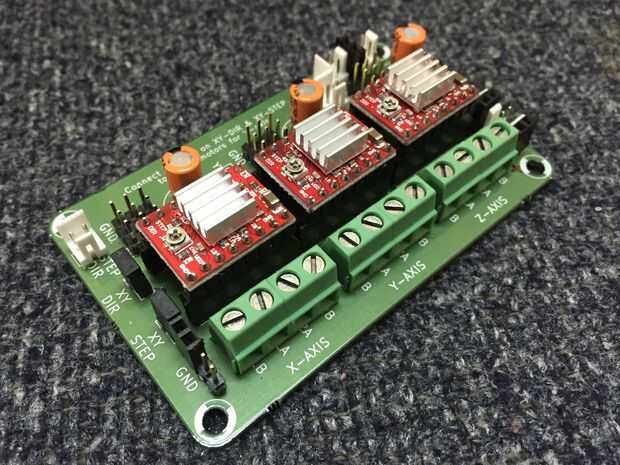
Motores paso a paso se utilizan para mover los ejes ya que se puede mover con una resolución muy precisa. Hay un montón de controladores de motor y estoy usando el A4988 unos. Son bastante baratos y han servido mi propósito muy bien. Usted podría montar en un protoboard pero hice un PCB agradable para estos (los Gerbers y esquemas se adjuntan aquí). Estos conectan el Arduino con GRBL.
Este enlace de Pololu muestra exactamente cómo conectar el A4988 a los motores paso a paso y cómo configurar el límite de corriente en ellos. Preste especial atención a cómo se establece el límite de corriente. Fuera de la caja, no hay límite de corriente confiable se encuentra en el A4988s.
En mi tablero, hay dos puentes que permite dos comparten el mismo paso y señal de dirección para los dos motores de eje - paso de XY y XY DIR. Cuando se establece, la parte inferior dos A4988s conducir los dos motores de eje y basados en el mismo paso y dirección entradas de Arduino. Un punto importante de la Nota: Los dos motores de eje y giran en direcciones opuestas ya que están a cada lado del eje x. Por lo tanto, uno de los motores de eje y debe invertirse en la dirección. Esto puede hacerse mediante la inversión de las bobinas del motor en comparación con el otro motor del eje y.
GRBL es el software información de ubicación de coberteras en el plano XYZ a código máquina y lo traduce para los conductores del motor que luego los motores en esa ubicación concreta. En nuestro caso hemos utilizado solamente el plano X-Y. Más sobre cómo instalar GRBL se describe más adelante en la construcción.




")



")




