Paso 6: Regulador Arduino
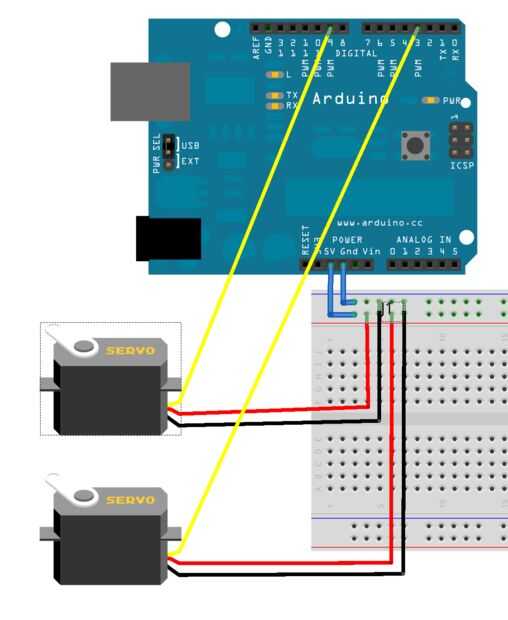
- Cableado - como puede verse en la figura - dos servos están conectados con el Arduino, no son similares, el servo de rotación completa (conectado al pin Digital 3) es controlado a través de protocolo PWM, mientras que el servo de botón es controlado con objeto de Servo.
- Sketch de Arduino - Unido, preste atención a las demoras y sus observaciones.
----------------
#include < Servo.h >
Servo1 servo;
int analogPin = 3;
int pos = 0;
void setup()
{
pinMode (analogPin, salida); establece el pin como salida
servo1.Attach(9);
}
void loop()
{
para (int i = 1; i < 30; i ++) {/ / rotación en sentido horario en pequeños pasos
analogWrite (analogPin, 125); Gire
Delay(300); duración de la rotación
analogWrite (analogPin, 0); detener la rotación
Servo de cámara
Delay(1500); parada de vibración
para (pos = 0; pos < 100; pos += 1)
{
servo1.Write(POS);
Delay(5);
}
Delay(3000); tiempo de disparo de la cámara
servo1.Write(0);
Delay(500); demora para cámara
}
Delay(2000);
analogWrite (analogPin, 200); regreso a iniciar la rotación
Delay(1200);
analogWrite (analogPin, 0); Movimiento de las manecillas
Delay(3000);
}

")









")

