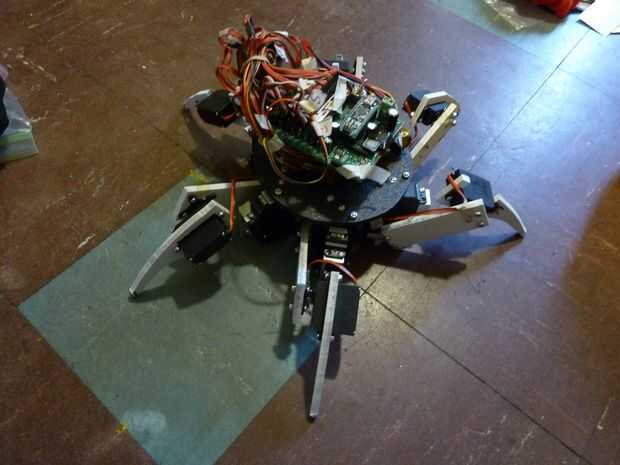
Aquí es un simple hexápodo que se puede construir a mano muy rápidamente. El diseño mecánico no es grande, pero es mucho en el beso (Mantenlo simple estúpido) estilo y debe ser factible en un fin de semana para los constructores de novicio a media experiencia.
No estar mejorando este proyecto cualquier momento pronto y la gente parece que visita mi blog de chip, así que pensé que iba por delante y documento como es. Esta había construido para una clase de segundo año ingeniería mecánica en el MIT. Los cables y seis patas que se vea complicado, pero ya que las piernas son la misma cosa repetida 6 veces, es más sencillo de lo que parece. Además, no llevar a la práctica controles remotos por lo que el código funciona autónomamente (cero de entrada, sistema de salida múltiple).
Otra vez, se trata de documentación de los pasos exactos involucrados en un proyecto semi-trabajo. No hay bases teóricas para el diseño de su propio hexápodo realmente se explican aquí.
Un completo cuadro conjunto del proceso de construcción existe aquí: 2.007 hexápodo (primavera 2011). Las primeras imágenes pocos allí son de aluminio Hexalinkagepod, basado en el hexápodo de Parallax boebot.
Un conjunto de artículos existe aquí: http://orangenarwhals.blogspot.com/search/label/hexaringapod
Me gustaría específicamente recomienda este post: http://orangenarwhals.blogspot.com/2011/05/dreaming-of-dancing-hexapods-2007.html
Un vídeo explicando el proceso de diseño en 7 minutos (este instructables entra en la construcción pero no el diseño): http://youtu.be/qTh-OGA_LeM
y aquí hay un video de ella al final:
~ Sierra de cinta vertical (a menos que tenga mucha paciencia con una maquinilla de afeitar)
~ lámina de plástico de 1/4 '' (cualquier espesor razonable tal que el plástico es bastante rígido está muy bien. Usé 1/4 '' ABS)
~ De 6'' de
~ 18 servos de RC (recomiendo tamaño estándar, he visto hexápodos con los servos de 9 g pequeña, pero creo que sería difícil cortar los agujeros para estos servos a mano), con el servo en forma "+" cuernos y servo centro tornillos que deben venir con el kit.
Usé 6 Hitec 311 y 12 Vigor VS-2 servos porque eso fue lo que podría buscar para.
~ Destornillador
~ 4-40 tornillos y tuercas de fijación (casi 48 de ellos), o que los pernos de ajuste a través de los agujeros de la brida de servo (los agujeros laterales). Por lo menos 3/8 '' largo (suficiente para 1/4 '' plástico o Al y una contratuerca caber allí).
~ Taladro y broca, idealmente también una prensa del taladro
~ Trinquete o llave para tornillos 4-40
~ Idealmente, un vicio o una abrazadera
~ Lo ideal es una sierra de cinta horizontal
~ Opcional: 2 x 4 madera
~ Medición instrumento, regla o muy preferentemente pinzas
~ Opcional: Herramienta de desbarbado
Elementos requeridos (electrónica):
~ Arduino nano + tablero + cabeceras masculinas (para los servos)
~ 6 cables de servo Y-divisor o un controlador de servo serie chip (ya que la librería de arduino por defecto sólo admite 12 servos). Compré un 24ch uno, pero obviamente no todos 24 ch, no seguro por qué lo hice. >. <; pero soy una persona conservadora y tienden a hacer grandes compras por si acaso. Estoy trabajando en arreglar esto.
Creo que otra opción es utilizar un arduino mega.
~ Cable de programación portátil y usb adecuado para tu sabor de arduino
~ Jefes masculinos
~ Los cables puente (o solo hilo conveniente para breadboards)
~ Potencialmente algunos cables prolongadores de servo, hembra a hembra (y pegar cabeceras en ellas para hacerlas mujer a hombre) va a venir bien.
~ Breadboard (probablemente es mejor si se pone el nano en el protoboard estándar 700 punto uno)
~ Batería (recomiendo un sabor de batería recargable de la batería, como los 18 servos están hambrientos de poder)
~ ~ por lo que se podría utilizar una batería 4xAA y estaría bien (los servos son nominalmente 5V servos pero funcionará bien a 6v, sólo serán un poco TICs porque sus circuitos/feedback + controles están diseñados para uso de 5v), pero si fueran pilas alcalinas (~ 3000mAh) funcionaría hacia fuera después de una hora o menos de uso
~ ~ como alternativa, utilizar un LM7805 chip regular un paquete de baterías de lipo, que funciona en 7.4v, hasta 5V. Estos reguladores de potencia lineales disipan la energía extra como calor. Para saber cómo usar uno, por favor google "tutorial 7805". Por ejemplo, ver: http://jumptuck.com/2011/11/15/voltage-regulation-friend-7805/.
Tiempo necesario: 1 fin de semana si sigues a mi diseño. Le animo a diseñar su propio hexápodo aunque, una vez que vea lo fácil que es!
Lo utilicé también incluyó un 2.007 (que es un curso en el MIT) Junta del portador (parece https://sites.google.com/site/2007arduino/). Esto trae las clavijas del servo hacia fuera para facilitar el acceso, así como ha construido en un protoboard y una conmutación poder regulador * que puede suministrar hasta 3A a 5v, que es probablemente lo suficiente para 18 servos. Parecía funcionar a-okay, pero mi código sólo ha tenido 6 servos moverse en cualquier momento.
También hice mi propia batería pack fuera de algunas baterías de Sanyo UR18650U que fueron donados a ingletes por Tesla. Son 3.6V, así que hice una serie de 2, 3 batería paralela para un 7.2V 3.3Ah batería. Esto obviamente es excesiva. En 3,3 Ah y continuamente dibujo 3A, pude ejecutar mi hexápodo para más de una hora. He encontrado que 10-20 minutos es un montón de tiempo de ejecución para hexápodo.
* como contraposición a un regulador de corriente lineal LM7805, un regulador de potencia de conmutación es mucho más eficiente.
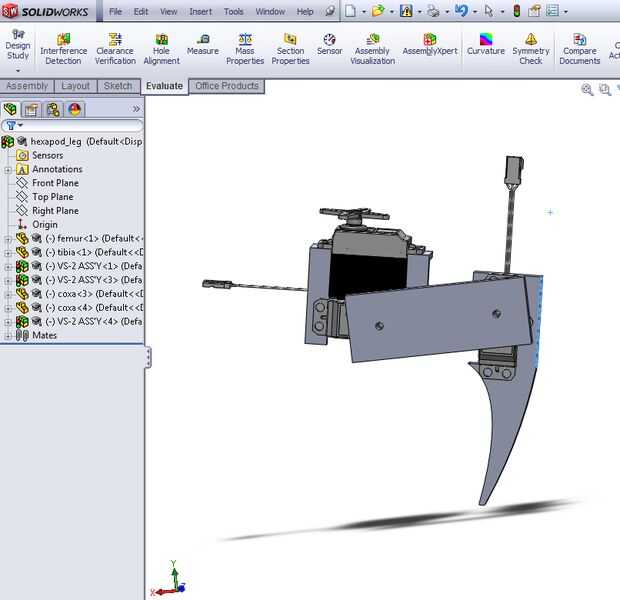
Nota: El hexápodo archivos de CAD para Solidworks 2012 y detalles sobre tuercas y tornillos, son sólo para referencia. También hice un diámetro versus error de radio sobre el cuerpo, por lo que el cuerpo es demasiado grande.
==
Enviado por ingletes para el programa de patrocinio de Instructables.


 con Visuino")










