Paso 9: Alambre er para arriba! 12 servo salida versión
12 SERVO SALIDA VERSIÓN
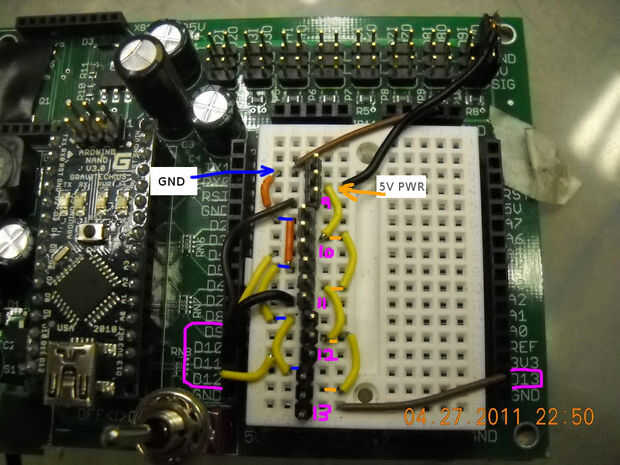
Adecuado para conocer las limitaciones de la biblioteca de servo Arduino por defecto. Ver dos fotos para el cableado con la tarjeta de portador de 2.007 nano.
Instalación de tablero
Si no tienes un tablero de 2.007 portador (no para la venta a partir del 24 de junio de 2013, aunque eso puede cambiar), poner el nano en el protoboard y por consiguiente de alambre, con la fuente de 5V en el cuadro están sustituyendo su 5v de la fuente (por ejemplo, LM7805 con 4xAA baterías como se describe en el primer paso). No quieres poner 4xAA en su arduino en "VIN" y "5V" en el arduino ya pone a través de un regulador que no puede manejar suficiente corriente para abastecer todos los 18 servos--tu hexápodo será lánguida y soñolienta como protección contra sobrecorrientes a patadas el arduino, a menos que freírlos a tu arduino. Debe suministrar el arduino y el lm7805 circuito de la batería 4xAA y luego usar el LM7805 circuito salido para alimentación de tus servos para no morir de hambre los de la corriente.
Ver si nunca has usado un protoboard antes de
Cables servo
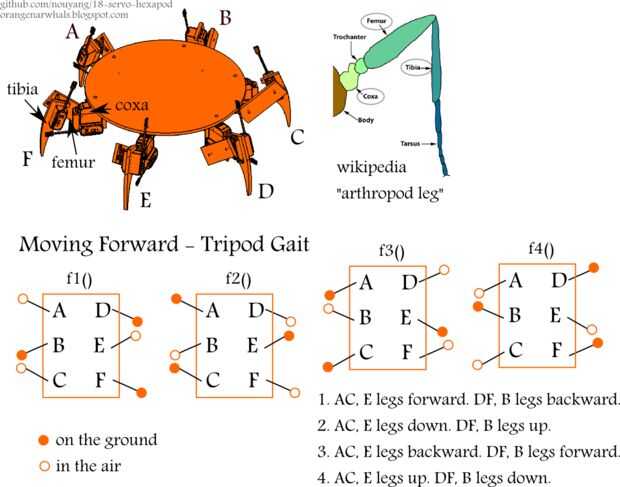
Muy bien, así que tenemos seis cables Y-divisor. Será controlar 12 servos total (2 cada uno). Entonces tenemos 6 patas más independientes, servo 12 salidas total requerida. Ahora escoge una cara para ser la parte delantera del hexápodo y mentalmente dividir las piernas uniformemente por ambos lados. Los servos delanteros y traseros (cadera, fémur, tibia) de cada lado serán conectarse juntas y las piernas medianas será independientes.
Así, en el código, sólo necesitaremos 12 salidas de servo, así:
/*
~ frente ~
A D
B E
C F
~ nuevo ~
*/
Servo E_coxa;
Servo E_femur;
Servo E_tibia;
Servo B_coxa;
Servo B_femur;
Servo B_tibia;
Servo AC_coxa;
Servo AC_femur;
Servo AC_tibia;
Servo DF_coxa;
Servo DF_femur;
Servo DF_tibia;
Nota: En la foto, tengo las letras colocadas incorrectamente alrededor el hexápodo circular. Observe que no importa para explicar cómo funciona la marcha de trípode.


 con Visuino")










