Paso 3: Construcción - eléctrico


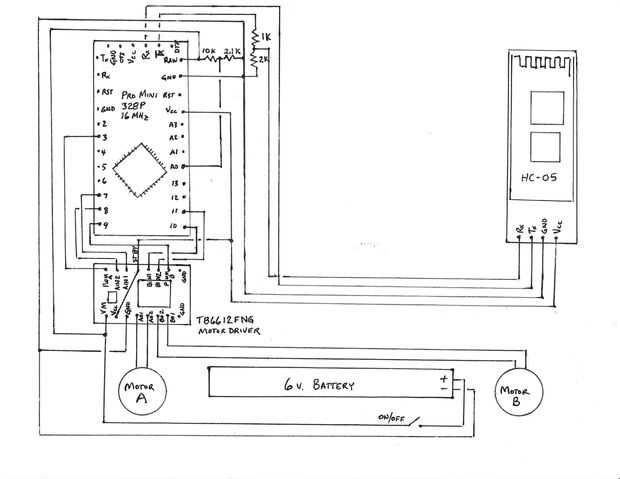

Se debe probar el módulo Bluetooth HC-05 para verificar la tasa de baudios coincide con su bosquejo y para cambiar el nombre del módulo a algo más reconocible que "HC-05" cuando aparece en la exploración del Bluetooth de tu teléfono Android. Comience por conectar el adaptador FTDI USB/TTL (juego a 5 voltios) Vcc a Vcc de HC-05, tierra a tierra, Tx de FTDI para Rx de HC-05 y Rx de FTDI para Tx de HC-05. Nota que el led sobre el HC-05 parpadea rápidamente, significa que está en modo de publicidad. Pulse y mantenga presionado el botón pequeño del módulo mientras simultáneamente extrae entonces restaurar energía al módulo para entrar en modo programación: el led destellará lentamente, y puede soltar el pulsador. Abierto programa de terminal Realterm , ficha de puerto, seleccione 38400 baudios, seleccione el puerto que está utilizando en el menú desplegable y haga clic en el botón cambiar, seguido de click izquierdo del ratón en la parte superior superior de la pantalla del terminal para comenzar. Luego seleccione la opción Enviar, escriba en el cuadro de enviar, verifique las dos cajas + CR y LF y haga clic en el botón "enviar ascii". Una "respuesta OK debería aparecer en la ventana de terminal. Puede establecer la velocidad en baudios lo que funciona para usted, por ejemplo en + UART = 115200, 1, 0 para 115200, N, 8, 1. Puede ejecutar el robot como baja como 9600 baudios, pero si quieres enviar información desde el robot (como voltaje de la batería), necesita un ritmo más rápido de la velocidad en baudios como 115200, puesto que el programa maneja normalmente 4 bytes a la vez (Serial.available() == 4) pero la función de control de la batería pone hacia fuera 14 bytes, así el búfer de recepción serial debe estar claro de la información de 4 bytes antes de que el programa puede enviar los bytes 14 detrás. ¿Si luego escribe AT + UART? deben repetir los nuevos valores. ¿Mismo para el nombre, enviarlo en + nombre = xxYYZZ y AT + nombre? para verificar. Ver manual de HC-05 . ¿AT + PAPEL? debe dar OK + papel: 0 indicando un dispositivo esclavo. Para otros proyectos, puede crear un vínculo directo entre dos módulos de HC-05, uno como maestro (papel: 1) y otro como esclavo (papel: 0), pero en este proyecto estamos utilizando el dispositivo Android como dispositivo Bluetooth maestro.
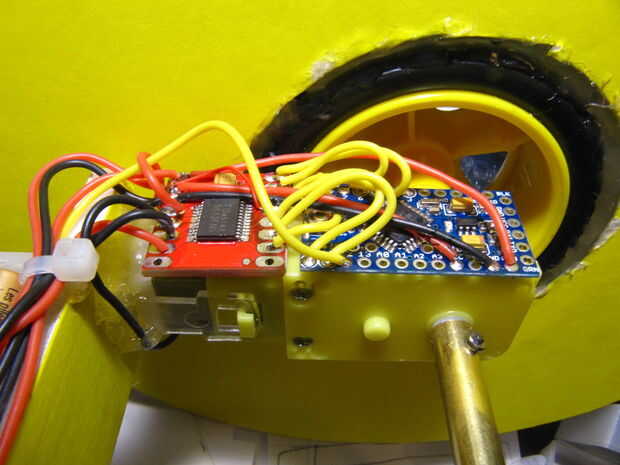
Opté por usar el Mini Pro y el conductor del motor de TB6612 debido al tamaño mucho más pequeño comparado con un Arduino Uno y un escudo del motor. Los tableros más pequeños puede caliente pegado al motor para una instalación limpia. Soldar un encabezado hembra de 6 pines para el Mini Pro para hacer una conexión segura con las clavijas del adaptador FTDI para la programación, y también permite una conexión en serie extraíble (sólo cables TX y RX) desde el módulo Bluetooth HC-05. El módulo de Bluetooth lo contrario interferiría con la descarga del programa FTDI, así que el encabezado / conector asegura que no hay un conflicto. Otra forma de evitar un conflicto de Bluetooth sería utilizar software serial para el Bluetooth, pero software interrupciones serie se arruinara la función millis() utilizada en el programa.
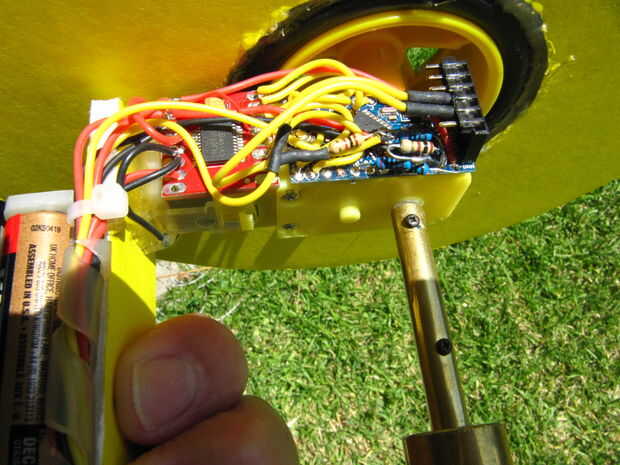
Un 4 AA baterías de la célula titular se encuentra en la parte inferior del robot para minimizar el peso. Soporte de la batería está caliente pegado, fortalecimiento de la tira de chasis de núcleo de espuma. Puedes usar una batería más grande, las células del AA tal vez 6, sólo aumentar las dimensiones y la separación de la rueda según sea necesario. Si utiliza un voltaje de batería diferentes y también quieren el control de la batería, ajuste los valores de resistencia según la original fuentey cambiar el tamaño de paso en el programa. Tenga en cuenta que utiliza la referencia interna 1,1 voltios en el cálculo de resistencia y los tamaños de paso en vez de la referencia de 5 voltios normal porque la batería de 6 voltios es más probable que sumerja por debajo de 5 voltios, por lo tanto la referencia inferior.
El programa de joystick fue diseñado para 1 motor y 1 Dirección servo, pero su biblioteca L293 ofrece otros modos, como rueda de 2 y 4 modos de la rueda. La biblioteca de L293 es en la primera descarga en la parte inferior de la fuente original, Car_With_Sensors_Continuous.zip (7k). Ha cambiado el programa de 1 motor y 1 servo por 2 motores y sin servos, mediante el uso de una fórmula proporcional en coche la velocidad de la rueda se basa en la información de ángulo enviada por la aplicación. He incluido una función de Donut para divertirse, hace que el robot gire en su lugar ya sea izquierda o derecha dependiendo de si se activa el botón "A" o "B". El robot debe ir a un ritmo relativamente lento; afectadas la A o B botón entonces aumento la velocidad. La cosa va tan rápido es un borrón! Si los leds fueron agregados al robot (ya en el programa), sería una gran exhibición durante la noche.
")












