Paso 3: Construyendo el Motor bidireccional
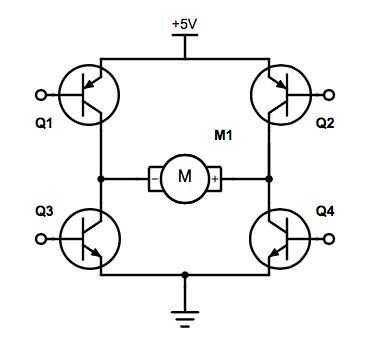
Para mover arriba y abajo el electroimán, se utilizó un puente H para mover un motor en dos direcciones. El esquema del puente H se muestra en la figura anterior. Consta de dos transistores BJT PNP, específicamente punta 125, dos transistores BJT NPN, específicamente la punta de 120 y un motor estándar. Q1-Q4 son entradas de señal conectados a Arduino Uno. 5 voltios vendrá de la Arduino Uno. El Arduino Uno será responsable de controlar el motor. Alternativamente, añadir engranajes para reducir la velocidad rapidez el electroimán es levantado y bajado. Otra opción es usar un desplazador de nivel para controlar la velocidad del motor, que no se discutirá porque nos decidimos por engranajes para reducir la velocidad del motor.










")


")