Paso 7: Montar el 2000 grúa electromagnética
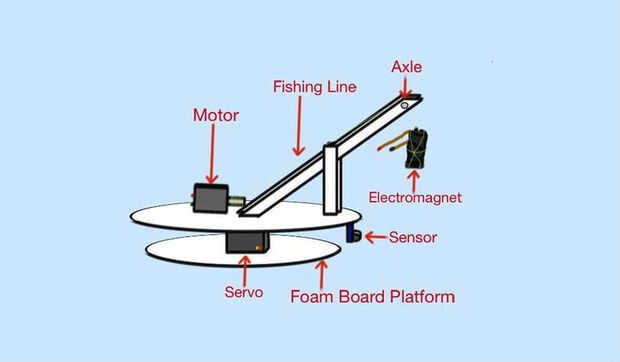
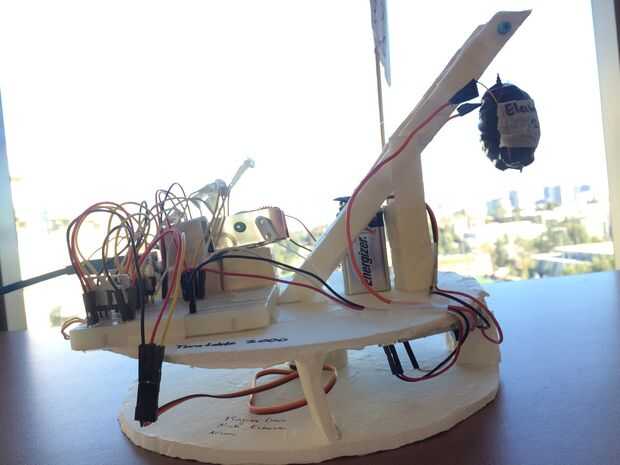
Ensamble "brazo" de la grúa como se muestra en la foto, con pegamento o cinta adhesiva. Para agregar seguridad adicional agregue patas hechas de tablero de la espuma en la parte inferior de la plataforma giratoria después de que el servo se une.
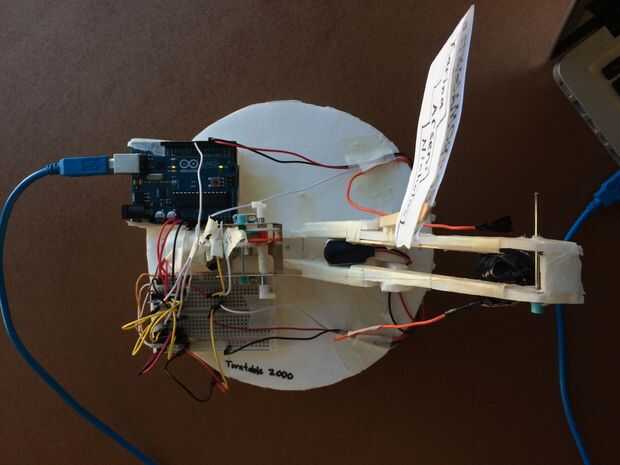
La placa principal se colocará en la parte superior de la plataforma giratoria con el Arduino. Con cinta adhesiva estos firmemente en la parte superior de la plataforma giratoria para no deslizarse.
El servo se asegurará en la plataforma inmóvil en el extremo plano, mientras que el extremo giratorio del servo se unirá a la plataforma giratoria de pegamento o cinta adhesiva.
El motor quedará sujeta con cinta de enmascarar en la parte superior de la plataforma giratoria justo detrás del "brazo" de la grúa. Línea de pesca se unirá al motor, pasará a través de un eje colocado en la parte superior del "brazo" y celebrará el electroimán de forma segura.
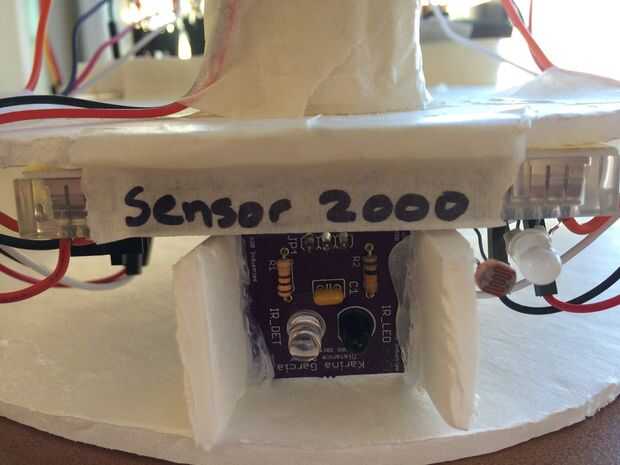
El IR y color sensores se colocará directamente debajo el electroimán en la plataforma giratoria. Un protoboard fue grabado boca abajo sobre la plataforma giratoria que conecta todos los circuitos del sensor y tenía cables de arranque conectar al tablero principal y la Arduino Uno en la parte superior de la placa giratoria. Asegúrese de mirar los sensores hacia afuera como se muestra en la foto de arriba. Agregar (si es necesario) de la espuma de las paredes de la Junta a los lados del sensor IR para evitar interferencias por el sensor de color y también para evitar la detección temprana de los objetos.










")


")