Paso 6: Configuración del servidor de BitVoicer
En este paso tienes que construir el servidor BitVoicer Esquema de voz con las oraciones para ser reconocido y los comandos que se enviará a la Arduino. A ned de este paso, hay dos enlaces a archivos que contienen todos los BitVoicer Server Objetos de la solución utilizado en este Instructable. Si no desea crear objetos de la solución todos uno por uno, puede importarlos (Importación de objetos de la solución) usando estos archivos.
Antes de empezar a construir el esquema de la voz, tienes que crear un dispositivo que representará el Arduino en el servidor BitVoicer. Crear un dispositivo de mezclado y asígnele el nombre ArduinoUnoWiFi. En la ficha comunicación , seleccione TCP/IP y escriba la dirección IP asignada al módulo Wi-Fi en el paso 3. En la ficha de señales , permiten las señales de Inicio de periodo activado y Final del periodo activado . Seleccione Int16 SendData comandos para ambas señales y seleccione el dispositivo de ArduinoUnoWiFi como el objetivo de los comandos. En el campo de datos, escriba 1 para la señal de Inicio del periodo activado y 0 para la señal de Final de periodo activado . Estas señales harán la vuelta de Arduino en un LED cada vez se reconoce la palabra de activación. Cuando expira el período activado (definidos en el esquema de voz), este LED se apagará.
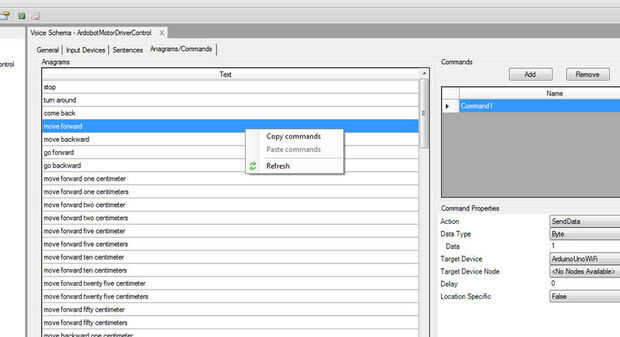
Ahora vamos a construir el esquema de la voz. Aunque el robot tiene sólo 40 comandos básicos, puedes crear muchas combinaciones de palabras que activan el mismo comando. Por ejemplo, puede que desee las frases "mover un metro hacia adelante" y "ir hacia adelante de un metro" para desencadenar el mismo comando. Además, puede crear comandos complejos como"una plaza" que desencadenará una serie de comandos temporizados en secuencia. Por eso, el esquema de voz puede crecer mucho y muchos más de 40 comandos básicos. BitVoicer servidor soporta ilimitados frases puede definir tantas oraciones como necesidad (mina terminó con penas de más de 80). Aquí me gustaría dar dos consejos: crear un comando predeterminado en el administrador de servidores de BitVoicer Opciones; y copie y pegue (foto arriba) comandos de una sola frase a los demás.
Comandos de oración envía byte tipos de datos al Arduino. Utilizar las constantes definidas en el comienzo del esbozo para conocer el valor que debe enviarse para cada comando. Comandos complejos enviará muchos valores en secuencia y usted tendrá que controlar el intervalo (retraso) entre ellos de modo que ningún valor se envía mientras que el comando anterior está en ejecución. Utilice el campo de retardo para establecer el intervalo entre los comandos.
Archivos de objeto de solución:








 con Arduino y Android(bluetooth)")



")
