Un diseño a la medida utilizando piezas seleccionadas cuidadosamente con TinkerPlay. La idea detrás de la selección fue que le giran el torso sosteniendo el hacha, y que, debido al peso del motor, tendría que ser bastante resistente. Por lo tanto, 4 patas igualmente espaciadas alrededor de la base parecían la mejor opción, aunque realmente depende de usted. Otra manera de construir esta habría sido hacer las piernas más largas y equilibrar el peso doblando una espalda, similar a cómo una persona se encuentra cuando un eje de balanceo. Una cosa a tener en cuenta es que el más grande y más robusto que quieres las piezas a ser, más tiempo tendrá el tiempo de impresión. Nuestro tiempo total de impresión (que tomó dos placas de construcción lleno de la impresión debido a todas las piezas) era cerca de 5 horas hacer un robot parado aproximadamente 5 pulgadas de alto.
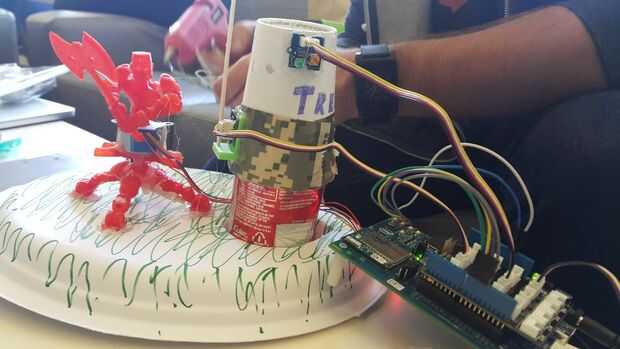
Montaje del motor fue simplemente 2 piezas atado al torso que podría realizarse a nivel para que el motor tenga una buena base plana. A continuación algunos palos (en este caso café agitando palos) fueron cortadas a la medida y utiliza para apoyar el motor y fue asegurado usando pegamento caliente. La parte superior del torso encajar bastante bien en la bancada, pero dependiendo del tamaño que impresión, puede que necesite añadir una pieza más para mantenerla erguida. Debe ser robusto que cuando el hacha hace contacto al final de la rotación, el cuerpo no vuelque.
El uso de sensores es muy sencillo. El motor es enviado a girar a poca distancia y el retorno a la posición inicial. Puesto que todo en el robot es sostenido en lugar, el hacha se coloca en una posición que, al final del arco, hará contacto con el botón que luces encima. En total, 3 componentes forman el sistema de Edison total: un LED verde, un sensor de botón y un motor paso a paso.




")





")


