Paso 5: Día 5, el cableado y la primera prueba de manejo
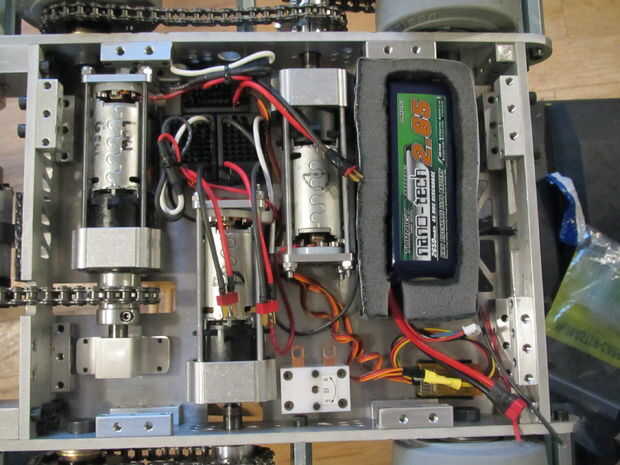
El sistema eléctrico consta de los siguientes componentes:
1 receptor de Hobbyking R610
1 equipo de Whyachi MS-1 interruptor (descatalogado, MS-05 debe ser adecuada)
1 Turnigy Nano-tech › 2650mah 6s1p Lipoly pack
1 mezclador de cola V Digimix
3 controladores de motor de Holmes pasatiempos BR-XL
Un pequeño montón de conectores deans, alambre y una bala de tapones
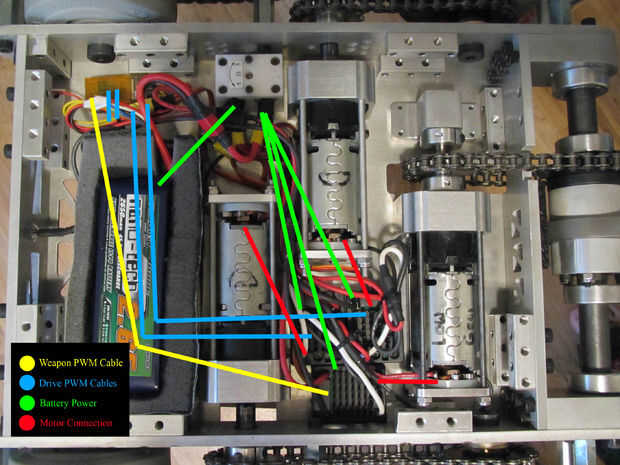
Los tres controladores de BR-XL son velcro a la placa de base entre los tres kits de sistema de mando de dewalt. El lado del motor de los controladores de que cada uno se conecta al 1 motor, positivo en el lado de la batería va en el interruptor MS-1, que tiene el cable positivo de la batería conectado al otro terminal. El cable de negativo de cada controlador se conecta directamente al cable negativo de la batería. Los cables de accionamiento PWM conectan el mezclador V-tail, que luego se conecta a los puertos de Ail/Ele en la rx. El cable de arma los controladores PWM va directamente al puerto del timón en la rx. Una luz de encendido construida un alto rendimiento LED y un resistor está conectado de la misma manera como los cables de la corriente para los controladores de motor.
El acolchado de la espuma que descansa en la batería es minimizar el riesgo de choque daños en combate.
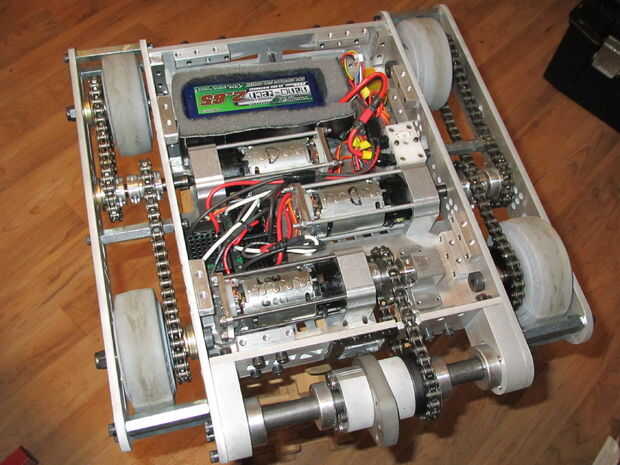
Una vez que todos los sistemas fueron enganchadas y calibrados (instrucciones de calibración completo viene con los controladores de BR-XL, sólo uno a la vez para evitar problemas de calibración) el robot estuvo listo para su primera prueba de manejo.


")





 - previene el pie de pivote Slacking por los ladridos")




