Paso 4: Inferior


A continuación necesitamos tener una idea de donde vamos a colocar nuestros CES (el controlador de los motores), y cuánto tiempo queremos que los cables.
Sus motores pueden tener conectores de bala que le permiten a la ESC y el motor juntos. En mi caso, ni los motores ni CES tienen conectores de bala, por lo que va ser de soldadura les juntos.
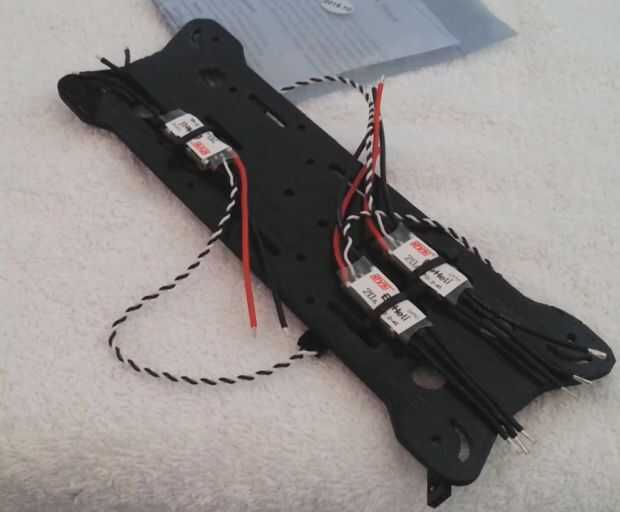
Coloque los 2 tornillos de M3 a través del brazo y la placa base inferior. Esto es sólo para posición así que no pongas una tuerca en él. Repetir este proceso para todos los brazos. Coloque los CES para que los cables negros se enfrentan en la dirección áspera de los motores y el rojo, el negro y los cables de señal se encuentran en el centro de lo quadcopter. Marque los cables donde va a cortar, pero no cortan aún. Quite los brazos y amarra todos 4 CES a la placa base.
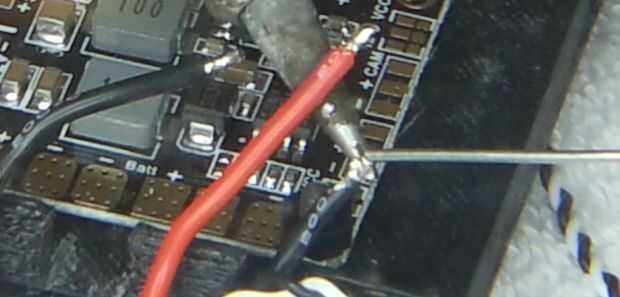
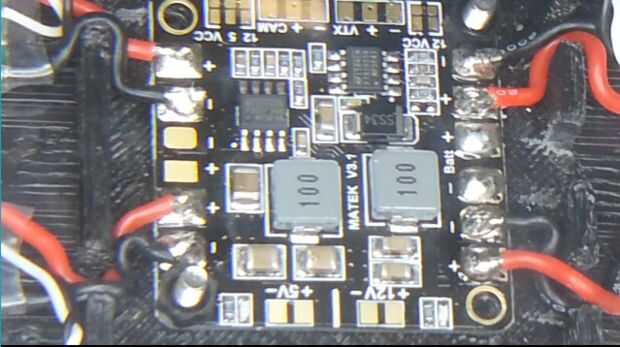
Siguiente instalar el tablero de distribución de energía (PDB) en el centro de la base de la placa con 4 tornillos M3 y tuercas y corta la energía del roja y negra los cables para llegar a las almohadillas marcada "+" (rojo) y "-" (negro).
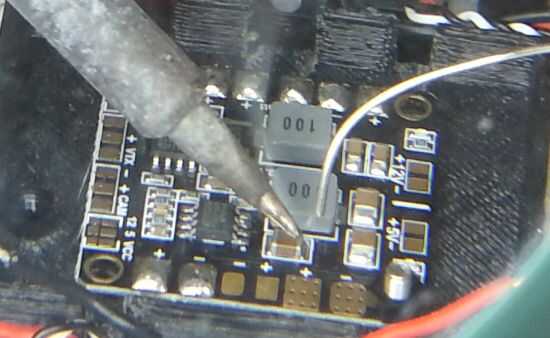
Usando el cortador pelacables, extraer una pequeña cantidad del aislamiento de los cables recién cortados y estaño de la soldadura de los extremos con, antes de pasar y estañar todas las pastillas en el PDB.













