Paso 6: Cableado del Motor
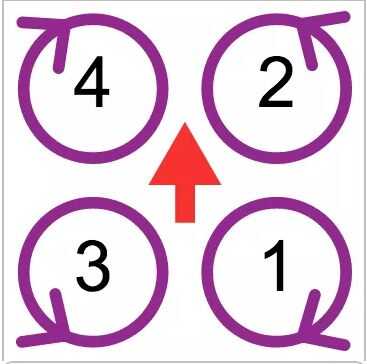
A continuación necesitamos hacer el cableado del motor. Tenemos motores para girar en una dirección específica para que las hélices conectadas generan elevación y no de succión. Usted necesitará consultar el manual para el controlador de vuelo. Opté por la rev5 Naze32 (ver imagen de la dirección del motor) que fue flasheado con la ultima versión de firmware cleanflight.
Todos quadcopters habrá 2 motores girando en sentido horario (CW) y 2 motores girando contra las agujas del reloj (CCW), pero no todos los controladores los tienes en la misma orientación.
Este es mi secuencia para acertar con el cableado
(!!! ¡ ADVERTENCIA! Asegúrese de que no tener los apoyos en. Pueden sufrir lesiones graves en manos si golpeado por apoyos móviles rápidos!!!!!! Realmente ha advertido)
He soldado los 3 cables de uno de los motores a los CES y había aislado con termo retráctil. Luego conecté el cable de señal de salida el motor correspondiente de salida en el Naze32. Después de conectar el Naze32 al puerto USB de mi ordenador y conectado a cleanflight. Conecte la batería al conector XT60. Ahora activa la opción de control del motor en la ficha motores de cleanflight y use el regulador motor para activar el motor, comprobar el sentido de giro. Si el motor está girando en la dirección correcta, tomar nota de la orientación del cable. Si el motor está funcionando en revers, desconecte el USB y poder, cortar con cuidado y tira el termo retráctil de 2 de los cables e intercambiarlos por reemplazar el encogimiento del calor. Con este mapa de oriantation completar el cableado de los motores restantes, control de la rotación después de cada uno.
(!!! ¡ ADVERTENCIA! Asegúrese de que no tener los apoyos en. Me refiero, usted podría conseguir lastimado!!)













