Paso 9: código
El código de conducción actualmente es bastante simple y os animo a trabajar en esto para hacer tu robot más inteligente.
Por lo que el robot comprueba la distancia hasta el siguiente objeto / de la pared. Si es menos de 20cm tope en reversa girando en una dirección al azar de una cantidad aleatoria de tiempo. Si la distancia es de menos de 80cm comenzará a dar vuelta lejos y si la distancia es mayor que sólo se ejecutará en una línea recta.
Ninguna rueda de giro delantera.
Si usted construye un robot sin un giro de rueda delantera entonces usted necesita activar el runDriveModeWithNoFrontWheel() método en lugar de la runDriveMode(); método. Esto es similar pero se gire al mover las ruedas a diferentes velocidades y direcciones. Para ser sinceros puede que necesite modificar este código como cada robot tiene un centro de gravedad diferente y se trabajará y girar a velocidades diferentes.

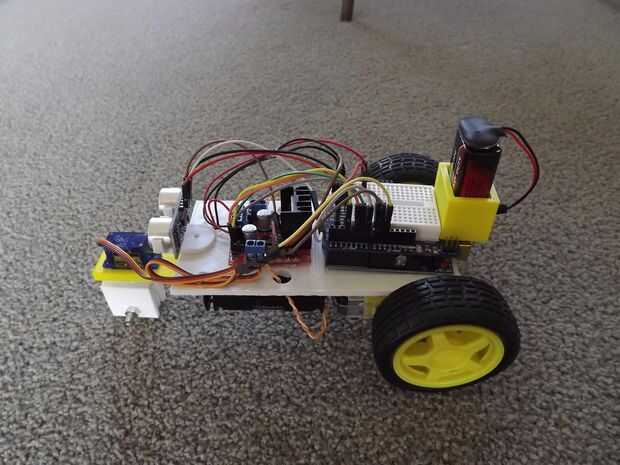
 Básicos Arduino Robot buscador de luz!")










