Paso 10: Notas, solución de problemas y mejoras.
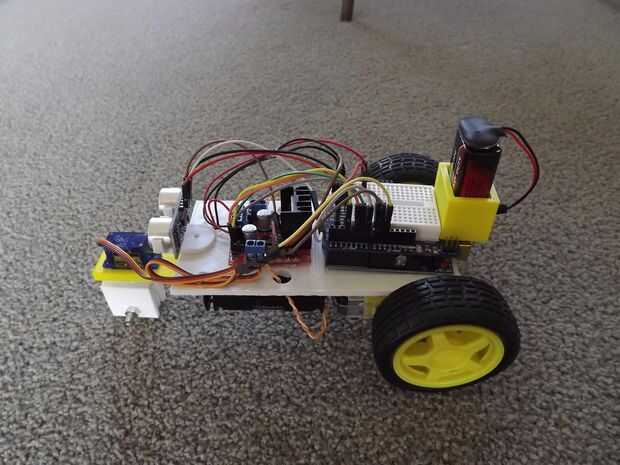
Tu robot debe ahora estar en funcionamiento. Su ahora depende de usted para cambiar el método de runDriveMode() para hacerlo algo más inteligente.
Algunas mejoras para agregar:
- Añadir un interruptor que conecta a ambos los AA batería pack 9V cables y, por lo que puede cambiar fácilmente el robot y
- Puede que desee añadir un retraso en el código después de que se enciende para que tengas tiempo para soltarlo una vez que se enciende.
- Prueba y conseguir que atravesar obstáculos.
- Agregar una garra de robot o arma-
Resolución de problemas
- Si tienes la rueda delantera es 'nerviosa' o el servo no parece funcionar muy bien puede ser que las baterías están bajando un poco. He encontrado que la fuente de 5V regulada no es grande cuando está usando sólo una fuente de alimentación de 6V (4xAA), generalmente puede esperar una caída de 1,2 voltios a través de un regulador de que creo. Probablemente lo que es peor si usas recargables que sólo será 4,8 voltios para comenzar con. Sin embargo puede llevar un cable desde el conector VCC (o cable de batería rojo directamente) y ponerlo directamente en su línea de alimentación servo. Pero ello sólo si está utilizando baterías 4AA, si utiliza alto voltaje lipo o uso similar la fuente regulada y en ese caso debería funcionar bien.
- También he dicho con una batería de 9V independientes, sin embargo una vez que minas fueron planas, acaba de conectar otro cable en la salida de la batería y en el VIN en el Arduino y que trabajó, esto debe estar bien hasta que las baterías comienzan a perder poder.
Déjame saber cómo te desenvuelves!
Aquí está un video de minas en acción.

 Básicos Arduino Robot buscador de luz!")










