Paso 5: Conectarlo - regulador del Motor

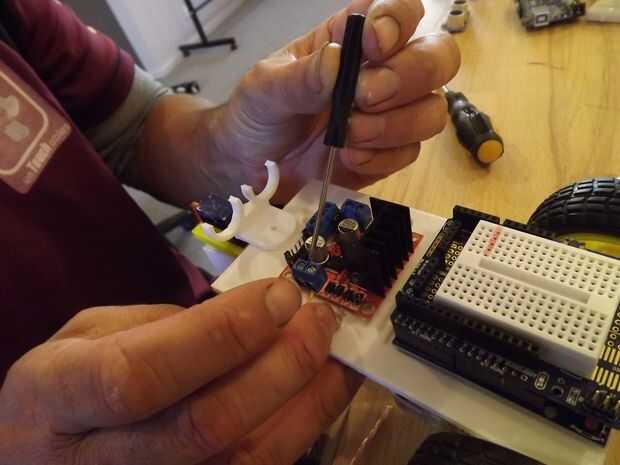
Conectar el controlador del Motor
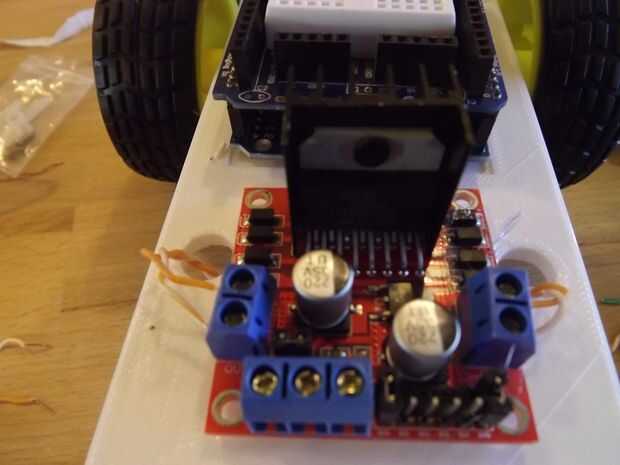
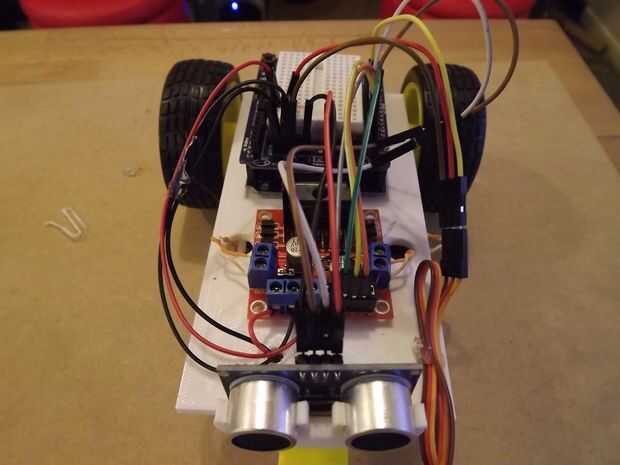
- Meter los cables de los motores eléctricos a través de los orificios de la base y hacia el controlador del motor.
- Estos 4 cables que van en los conectores 'OUT' en el lado del regulador del motor - 2 en cada lado. En esta etapa no se preocupe acerca de que conectan, pero la rueda izquierda conectan a los conectores izquierdos y la rueda derecha a la derecha los. Tienes una posibilidad 50/50 de conseguir adelante/atrás cableado derecho y lo probamos posteriormente.
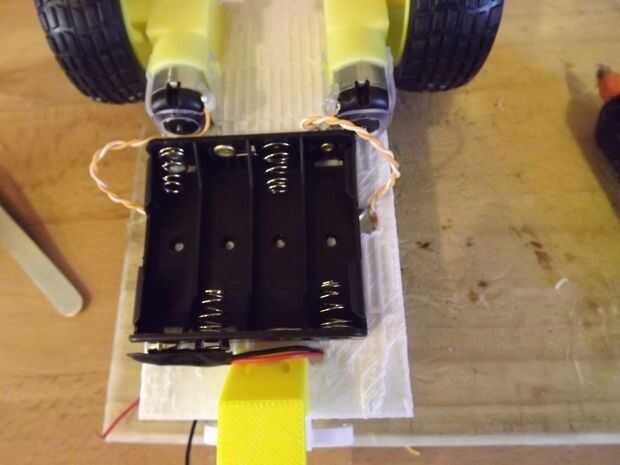
- Pegamento caliente el portapilas a la bajo lado del robot donde caben, espacio es un poco apretado en allí!
- Meter los cables rojo y negro a través del pequeño orificio en la base del robot.
- En la parte frontal del controlador motor hay un banco de 3 conectores. Conector el cable rojo en la izquierda mayoría en el controlador de motor. Si usted tiene un tipo diferente entonces esto debería decir sea VCC o + 12V o similar.
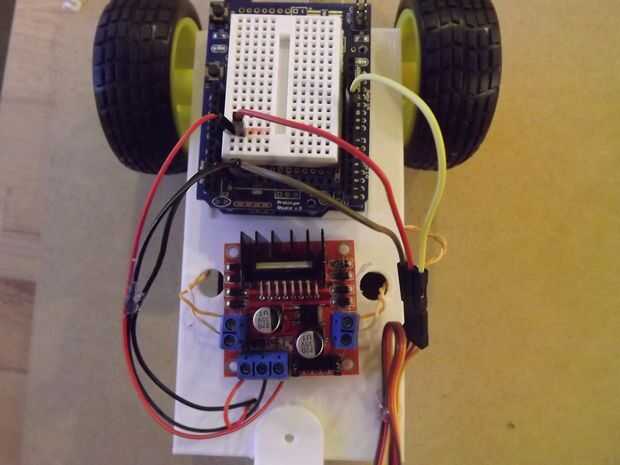
- Conecte el cable negro en el Banco GND del Arduino protoshield. Si no usas un escudo proto querrá correr un cable de tu Arduino GND una fila en la protoboard (color negro con un rotulador de la fila) y luego conecte el cable de la batería negro.
- Con un rotulador rojo dibuja una línea roja en una fila de la protoboard como se muestra en la imagen 4, esto le recordará que es el carril de la energía para el funcionamiento de otros dispositivos.
- 3 del conector de la toma un cable a la fila en su protoboard que usted solo color rojo. Este conector debe decir 5V. Es una fuente de alimentación de salida de 5V regulada.
Conecte las entradas de controlador para Arduino
Ahora tenemos que tomar 4 hilos de la línea de entrada de controlador de motor y enchúfelos en el Arduino. Necesitamos conectar en los pines PWM (Pulse Width Modulation) en el Arduino, lee esto para más información sobre cómo funcionan.
De todos modos mira de cerca en estos pines en el regulador del motor es la fila de 4 pines macho en una fila por los 3 conectores que ya han atado con alambre para arriba. Para conectar a estos tendrá 4 hembra a macho cables.
Mire el número en los alfileres de IN, esta escritura es bastante pequeña, tal vez tus ojos son mejores que los míos pero necesitaba una lupa para leer estos:). Estos son numerados del 1 al 4. Enchufe la IN1 y IN2 Arduino pernos 6, 11.
Conecte los pines IN3 y IN4 en pines 3 y 5.
El cableado es correcto creo que es:
1 -> 6
In2 -> 11
IN3 -> 5
In4 -> 3
Sin embargo se ejecutará un programa de prueba para confirmar esto y si algo no funciona en el orden correcto, que usted puede fácilmente cambiar alrededor cambiando los cables que conectan con el carril de IN. Dependiendo de qué manera alrededor enchufado su motor cables en estos podrían tener que ser cambiado alrededor.

 Básicos Arduino Robot buscador de luz!")










