Paso 8: Probarlo...
Ahora estamos listos para iniciar la comprobación de su robot.
- 4xAA pilas en el portapilas y ver si se ilumina el LED del controlador de motor. Si tan grande, si no revise tu cableado, tal vez el cable rojo de la batería no se asegura correctamente, o el conector de 2 º no va a la GND de Arduino, o el cable negro de la batería no va a GND. (desconectar las pilas cuando usted averiguar!!!)
- Asegúrese de que no se prende en el Arduino cuando enchufe las baterías AA. Si en el Arduino se prende tiene un cableado incorrecto y es necesario comprobar antes de proceder. Es muy probable que una salida de energía que en pin de 5V de Arduino.
Empezar codificación...
Si aún no tienes el entorno de desarrollo Arduino funcionando entonces ir a www.arduino.cc y descargar la última versión.
Instalar
Descargar el croquis adjunto a esta página y abrirlo, luego guardarlo en la carpeta de Arduino con algún otro nombre para tu bot (e.g. myrobot.ino), como a personalizar este archivo.
- Conecte su computadora a su robot, seleccione el puerto correcto (herramientas/Port) y subir el código a tu robot.
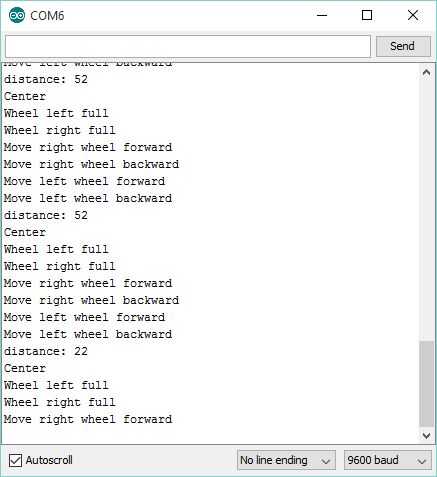
- Una vez cargado ir a herramientas/serie Monitor y abrir el monitor serial
- Esto pasará por una serie de pruebas en su robot.
- ruedas: Primero conducirá cada rueda a su vez en ambas direcciones. Observe en el monitor serial que va a decir que se supone que se conduce en la dirección. Si esto no coincide con lo que se ve necesita cambiar los cables enchufados IN1/IN2 (rueda izquierda) o IN3/IN4 (rueda derecha) alrededor de la otra manera. Si la unidad de ruedas incorrecta puede que necesite cambiar 1/2 por 3/4 etc, mantener estos intercambio sobre hasta que coincida con. Si usted está completamente en mal estado, a veces es más fácil desconectar todos los 4 cables y acaba de poner en uno a la vez hasta que hacerlo bien, luego la siguiente, hasta que tenga 4 todos trabajando.
- Problemas de ruedas: Si no todas las ruedas se muevan en ambas direcciones que es necesario comprobar el cableado. Si una rueda no es trabajo cheque su soldadura puntos sobre el motor eléctrico y también en que se conectan al controlador de motor. Si tienes un voltímetro puesto esto sobre los terminales de salida (OUTx y GND de Arduino) en el controlador del motor y ver si llega voltaje en ese punto (debe estar sobre 5-6V). Si no entonces el problema es en los cables 'IN' y donde estos son conectados a Arduino, comprobar que tienes las clavijas correctas 3,5,6,11 enchufado.
- Volante: La próxima prueba se mueva la rueda delantera hacia la izquierda y la derecha, luego centro. Se realice un pequeño movimiento de la izquierda y luego el centro otra vez. Si ves que el centro no está perfectamente centrada necesita ajustar una variable en el código. Sólo depende de la precisión con adjunto.
const int WHEEL_CENTER = 85;
Encontrar la línea de arriba en el dibujo, es en la línea 25. Cada cambio es 1 grado de movimiento, así que si usted piensa que su centro de rueda del robot es a unos 5 grados cambiar esto por 5. Subir el bosquejo modificado y ver si eso es mejor. Puede tomar unas pocas iteraciones para llegar a esta derecha que la rueda debe ser recta.
- Ojos: Cada lazo a través de la prueba, mostrará una distancia, es la distancia hasta el objeto más cercano por el sensor de ultrasonidos, asegúrese de que se trata sobre derecho al poner un objeto delante del robot. Si tu distancia = 0 entonces el sensor no está conectado correctamente, compruebe el cableado nuevo.
Una vez que estés feliz que el robot está trabajando y desea realizar la prueba, busque el siguiente método en el código: (línea 43)
Comentar la runTestMode(); método y quite el comentario de la runDriveMode(); método, por lo que parece como sigue:
Subir el nuevo código, enchufar en la batería de 9V para el Arduino y programar tu robot gratis.
¡ Yay! ir el robot...

 Básicos Arduino Robot buscador de luz!")










