Paso 6: codificación
Hemos escrito algo de código que debe estabilizar el quadcopter y mantienen constante. Si quieres más elegante movimiento y los controles no dude utilizar esto como una base. Primero debe instalar la biblioteca Arduino PID disponible aquí: http://playground.arduino.cc/Code/PIDLibrary
Sugiero leer el enlace de los detalles técnicos de codificación, pero te voy a dar un repaso rápido. La clase de PID tiene tres entradas: un punto, una medida y una salida. La salida debe cambiar la medición de alguna manera, y el PID variará la salida para obtener la medida para que coincida con el punto. Hay un montón de lujo matemáticas detrás de la biblioteca, pero trata de hacerlo de una manera que los valores permanecen estables.
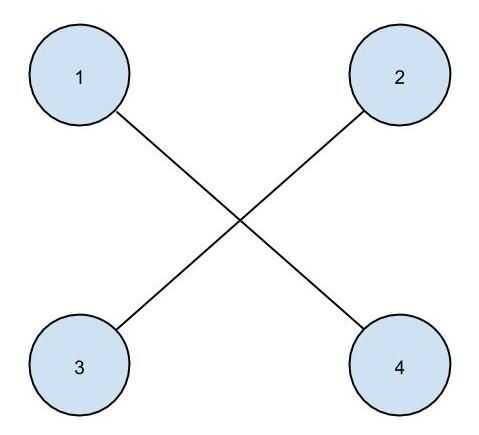
En nuestro algoritmo de estabilización tenemos dos controladores PID: una para la echada y de rodillo. El desplazamiento de velocidad entre 1 y 2 hélice está garantizado para ser igual que el desplazamiento entre la hélice 3 y 4. De manera similar para 1,3 y 2,4. El PIDs cambian los desvíos con el fin de mantener el pitch y roll en cero.
También querrá saber qué digital salida pin en el Arduino va a que motor y cambie el código en consecuencia. Los motores están etiquetados como arriba.








")




