Paso 8: Añadir el código!
El código adjuntado completamente comentado sin embargo aquí es un breve resumen.
Guante que transmite código de Nano:
- Biblioteca de transferencia fácil se incluye que se encarga de poner los datos en arreglos de discos y tiene una suma de comprobación de los datos en el lado receptor. Cortesía de Bill Porter. Programadores con más experiencia puede poner los datos en arreglos de discos y definir algún tipo de suma de comprobación, como lo hice. Sin embargo, es difícil competir con esta facilidad de uso de las bibliotecas.
- Estructura función de biblioteca fácil de la transferencia se utiliza para definir las variables que más adelante se asignarán valores de ángulo de transmisión.
- Variables de Flex se declaran que contendrá la lectura analógica de la tensión de los sensores de flexión y se asignan a los pines del Nano.
- Abierto y cerrado las variables se declaran que se asignará a los valores mínimos y máximos obtenidos de los sensores de flexión. Esto se utilizará en la función de mapa para definir el rango de desplazamiento del dedo. Este es un código inteligente adaptado de otro autor Instructable Gabry295.
- Condicionales se utilizan para variables de abierto y cerrado representan mínimo y valores máximos para el rango de lecturas de voltaje de sensor de la flexión.
- Función de mapa se utiliza para asignar el valor del sensor de flex a un 0-180 grados ángulo para los servos y enviado a la ONU.
Recepción a mano código de Uno:
- Servo y transferencia fácil bibliotecas están incluidas.
- Servo los objetos son definidos para cada dedo.
Estructura función de biblioteca fácil de la transferencia se utiliza para declarar las variables que se definieron previamente en el bosquejo de Nano.
- Pernos de la ONU se asignan a variables de pin de servo asignadas como salidas y fijadas a objetos dedo correspondiente de la clase de servo.
- Los datos entonces se recibieron mediante la función receiveData de la biblioteca de fácil transferencia y la función de escritura de la biblioteca del servo se usa para asignar el ángulo a los objetos de dedo.
Carga el código:
Descargar el archivo zip de biblioteca Easy Transfer.
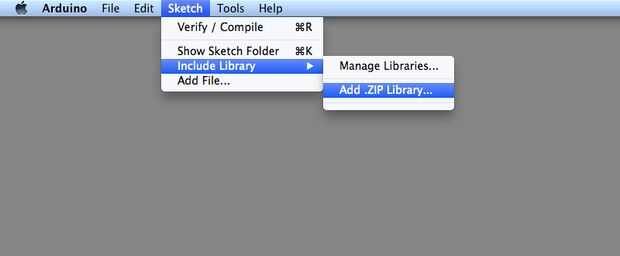
Agregar la biblioteca de zip de dentro el IDE de Arduino seleccionando "boceto" luego "Incluyen bibliotecas" y "añadir Zip" como se muestra.
Puede Agregar manualmente la biblioteca. Para instalar la biblioteca, primero salga de la aplicación de Arduino. Luego descomprima el archivo ZIP que contiene la biblioteca. Arrastre la carpeta Easy Transfer o guardar en su carpeta de bibliotecas. Bajo Windows, lo probable es que se llamará "My Documents\Arduino\libraries". Para usuarios de Mac, lo probable es que se llamará "Bibliotecas de Arduino de documentos". En Linux, será la carpeta "libraries" en su sketchbook.
- Abra el IDE de Arduino y copia y pega el código de Uno_Hand en un dibujo en blanco. Con la carga de la IDE de Arduino el código Uno_Hand en el Uno.The Xbee shield necesitará extraerse la ONU temporalmente para subir.
Abra el IDE de Arduino y copia y pega el código de Nano_Glove en un dibujo en blanco. Utilizando la carga de la IDE de Arduino el código Nano_Glove en el Nano. El Xbee tendrá que temporalmente se retiran del tablero Parralax para subir al Nano.













