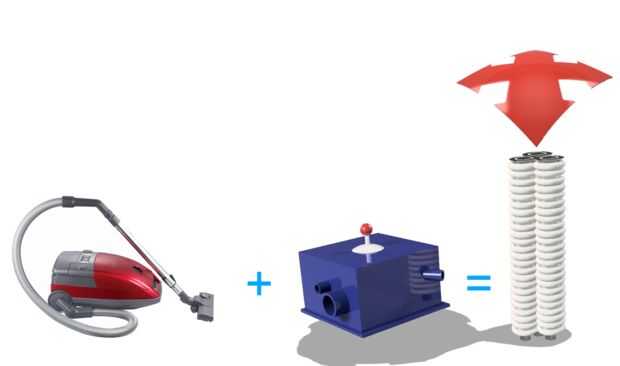


He creado las extremidades flex impreso 3d que pueden ser utilizadas para los brazos o las piernas de los robots. Son accionados por una aspiradora casera y don´t utilizar cualquier control electrónico, sólo se necesita 3d impreso joystick analógico de la neumático!
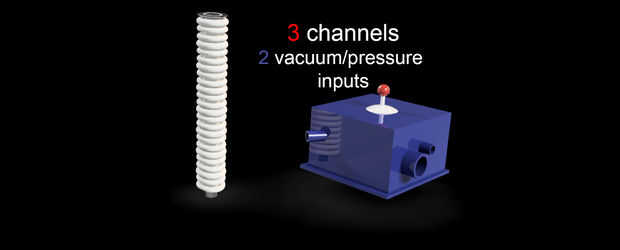
Cada extremidad está formado por 3 músculos interconectadas que son también la estructura de la misma. Se distribuyen en una configuración de 120 grados, que permiten controlar los movimientos en 360 grados de libertad, sólo combinando el vacío / la presión de entrada a cada conducto.
En el joystick centro gestionamos el aire que viene de la manguera de la aspiradora y de la salida de presión del aspirador. Dependiendo de la posición de lo joystic distribuye + / - presión al mismo tiempo para cada compartimiento. Tiene presión de dos entradas y salidas de tres cámaras. Puede imprimir un joystick adicional si desea controlar la otra extremidad de triple cámara.
La fuerza disponible depende de la potencia de la aspiradora y el tamaño de los compartimientos, pero con un compartimiento de 4 pulgadas podemos tener una fuerza combinada de unas pocas decenas de libras.
Contamos con 3 compartimientos para cada extremidad que es conectado por las 3 mangueras a la palanca de mando, nos permite tomar el control analógico de sus movimientos dependiendo de la posición de la palanca de mando.



")









