
Acerca de
El objetivo de este proyecto era construir un UAV basado en un diseño en 3D impreso marco y el tablero de control de vuelo AeroQuad. De tal modo, el objetivo fue simplificar el proceso de fabricación del marco, facilita la plataforma de vuelo crear en los casos de accidentes o la necesidad de múltiples copers. El proyecto fue encajado en quadcopter continua investigación en el grupo de estudios de los medios de comunicación interactiva, Universidad Tecnológica de Viena, Austria.
Cuando (David Griedl y Wolfgang Weltler) comenzamos con nuestro trabajo, hemos tenido un fondo áspero en electrónica, soldadura o vehículos aéreos controlados por control remoto. Durante el proyecto aprendimos mucho y compartir nuestros conocimientos con los principiantes en el campo. Por lo tanto nos gustaría proporcionar a una guía de lo que hay que tener en cuenta al construir un UAV y en qué áreas de problemas pueden ser evitadas.
En este instructable, utilizamos los términos UAV (vehículo aéreo no tripulado), abejón y quadcopter intercambiable, aunque UAVs a.k.a. drones aéreos pueden tener muchas formas y te debe no limitarte a un helicóptero estrictamente cuatro hélices, a.k.a. quadcopter.
Además, siempre Pruebe el enfoque más sencillo si eres nuevo en el concepto de quadcopters. Esto puede ser un hobby o un proyecto desafiante, y debería ser tan fácil como sea posible para usted. Incluso puede considerar comprar un bricolaje set en vez de elegir piezas por su cuenta, pero por supuesto construirlo usted mismo podría ser por qué quieres hacer en primer lugar
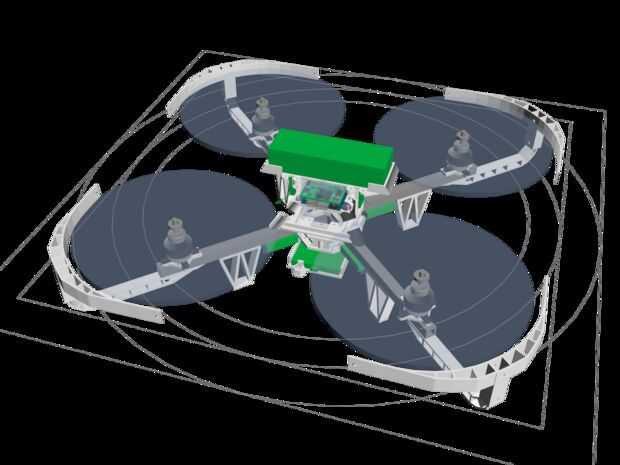
Nuestro Quadcopter
La foto de arriba muestra nuestro UAV creado. A continuación ofrecemos los detalles de todas las partes.
Marco de la
El diseño es un diseño de x estándar, lo que significa dos motores en la parte delantera, dos en la parte posterior. Ellos están numerados 1,2,3,4, hacia la derecha, comenzando con el motor delantero izquierdo visto desde arriba. Varios diseños son posibles, pero este se utiliza más con frecuencia.
La base son dos tubos de aluminio cuadrado con paredes de 2 m m soldados con autógena juntos. Las demás partes del marco se hacen de Polymaker PolyMax, un material muy durable de PLA para impresión 3D.
Hélices de
Debido a la disponibilidad, elegimos Graupner (una marca) hélices 10 x 5, significado de 10 pulgadas de diámetro, 5 pulgadas de la echada.
Motores
- Marca y nombre: planeta-Hobby 3530-12
- Rotaciones/minuto/voltios: 1200
- Resistencia: 75mOhm
- Max amperios (15secs): 26A
- Amperaje de salida: 30A
- Tamaño de la hélice: 9 x 5 (significado 9 pulgadas de diámetro, paso de 5 pulgadas)
- Peso: 74 gramos
- sugiere modelo peso por motor: 600-1400g
- Enlace (alemán): lindinger.at
Batería
- Marca y nombre: batería de LiPo de ECO SE Wellpower
- Células: 3
- Capacidad: 5000 mAh
- Voltaje: 11,1 voltios
- Peso: 402 gramos
- Corriente de descarga: 50 / 25C
CES (controladores de velocidad electrónicos)
CES sin nombre capaz de manejar 30 amperes.
Electrónica
Arduino Mega 2560 SDK con un tablero de vuelo AeroQuad v2.1, corriendo una versión fija del firmware AeroQuad de vuelo que se puede encontrar aquí.
Plantilla de impresión
Usted puede descargar un modelo de Hacéte un 3D MAX-archivo de lo quadcopter y un archivo zip que contiene todas las plantillas de impresión necesarias en el paso 4: impresión 3D.













