Paso 4: El diseño de Robot
Un diseño simple y efectivo fue creado con una básica rampa en la parte delantera por debajo del oponente y reducir su tracción.
Solo tuve acceso a una impresora 3D con un área de impresión de 140mm Cubed, por lo tanto, el robot ha sido impreso en un par de partes separadas.
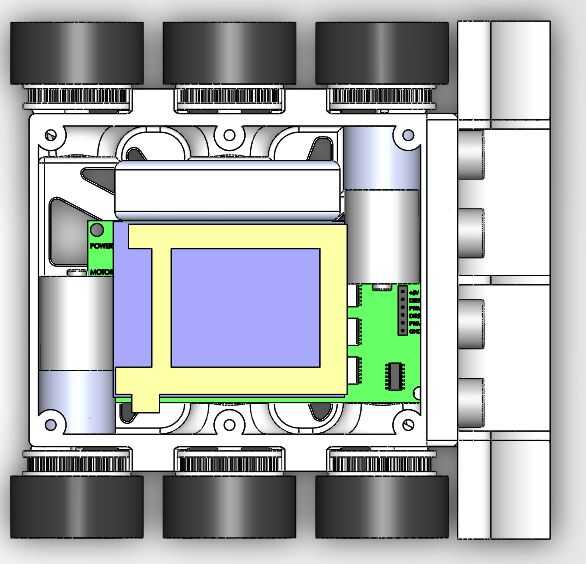
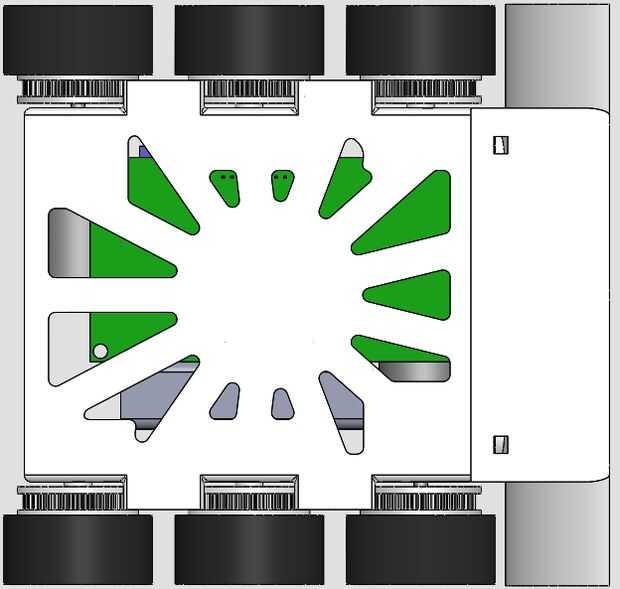
El posicionamiento de los componentes internos dentro del chasis se puede ver en las imágenes anteriores. Las ruedas se han colocado para que sobresalgan hacia atrás pasando la parte trasera del robot, que permite la tracción continua si se produce el montaje accidental de rampa de otro robot.
Debido al sistema de tracción diferencial, el bot es capaz de en el punto de giro cuando las ruedas están hecho girar en direcciones opuestas. Por lo tanto el radio de giro efectivo es 0.
Modelos de CAD de los componentes del robot se suministran al final de este instructivo.





")







