Paso 6: Impresión, montaje y cableado

Para imprimir:
1 x chasis principal
1 x rampa
2 x puntas de rampa
2 ruedas de x "D" diámetro
diámetro de ruedas de 4 x con la recta
1 x panel de cubierta de robot
4 x anillos de retención del eje
Para cortar:
4 x (barra de 4mm) en longitudes de 47mm
Proceso de montaje:
Después de todo es imprimir, cortar y limpiar el proceso de montaje puede comenzar.
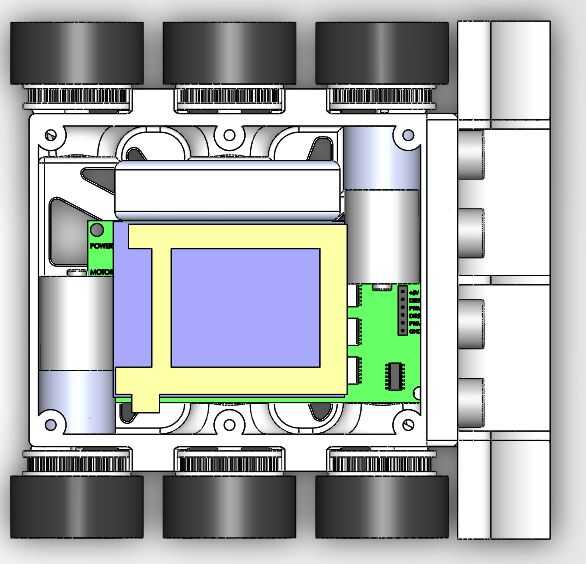
- Colocar el regulador del motor en la base del robot como se muestra en la imagen de arriba.
- Fijar los motores sobre el chasis
- Prensa un eje de 4mm en cada una de la recta diámetro ruedas
- Colocar las ruedas de diámetro "D" en los motores
- Por un lado, coloque la correa alrededor de la polea de los motores y la posición de la recta diámetro ruedas en la posición de la rueda más alejada, asegurándose de que la correa está firmemente alrededor de dos poleas
- Inserte la rueda central
- Repita para el otro lado
- Coloque el microcontrolador en el robot
- Coloque los sensores de ultrasonidos y línea en la rampa del robot
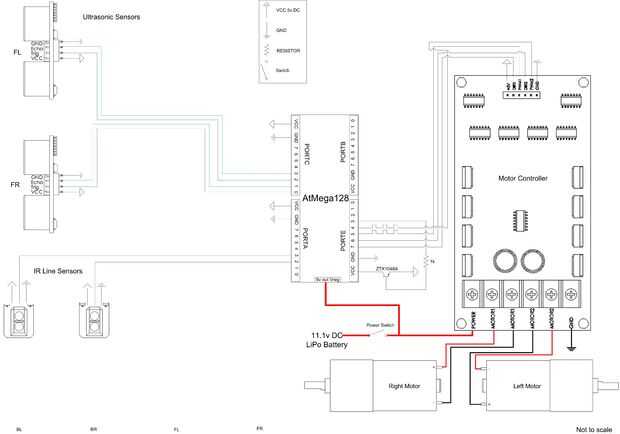
- Conectar el robot según el esquema anterior
- La rampa en la parte delantera del robot del pegamento, asegurándose de que esté tan cerca de la tierra como sea posible
- Poner la tapa en el robot
- Ahora el robot de código que desee





")







