Paso 2: Juntándolo todo





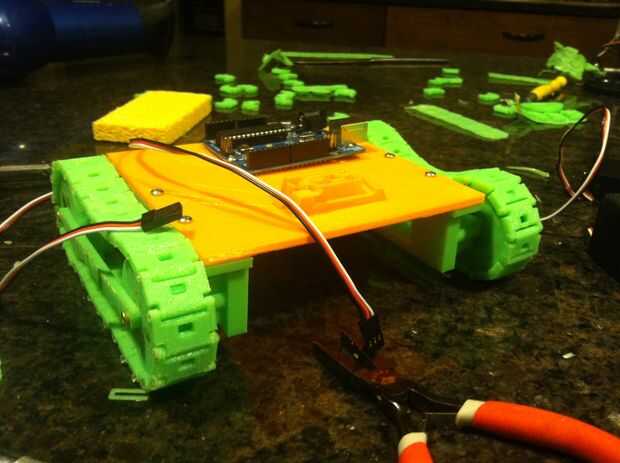



Perfore agujeros en la base para abrazaderas de plástico sujetar la batería a la parte inferior de la base. zip empate la masa en la parte inferior. Conectar el Arduino con los pernos. Después de Conecte los servos a la base usando pernos.
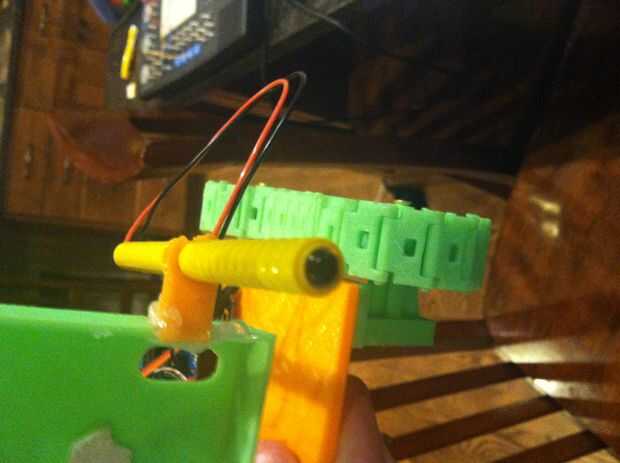
Para el cañón del tanque usé un tubo barato de un lápiz mecánico ya que el led encaja muy bien en tenía una buena conicidad.
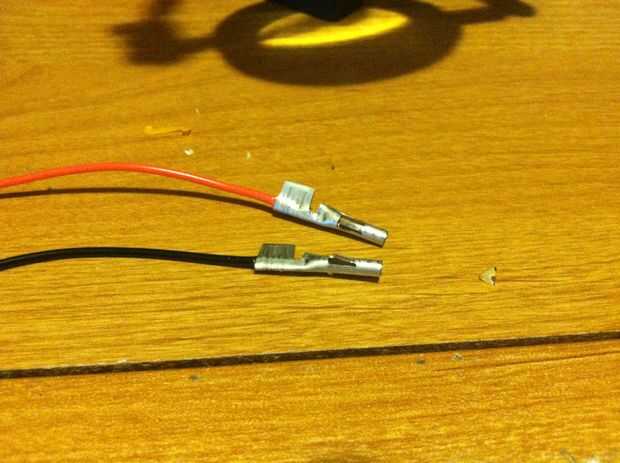
Para colocar todos los servos a la necesita crear un "break out board" de los servos. Conecté todo el poder y motivos juntos y conectar los pines de señal para Arduino junto con los pines para el módulo de Bluetooth. La salida de 5v de Arduino debería ser suficiente para alimentar todo.
Poner los pines de señal de los servos a los pines 9 y 10 y los servos pan y tilt a los pines 5 y 6.
El pin TX del Bluetooth va al pin 0 y el pin RX va al pin 1.
El IR led debe ir en el pin 13 y la tierra.













