Paso 4: Hacer el PCB y la soldadura de las piezas



El contorno de la PCB es de 6 cm x 9,5 cm
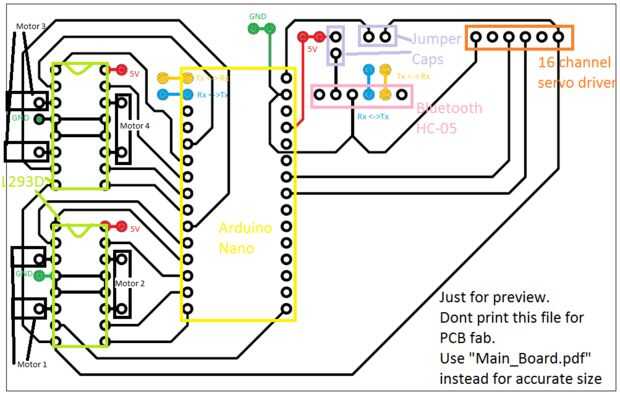
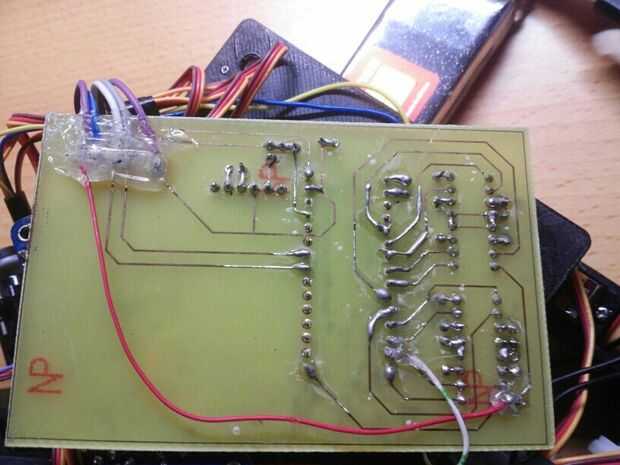
Primero tienes que hacer el PCB usando el archivo " Main_Board.pdf ".
Por favor recordar que el archivo pcb/pdf es Inferior , se debe comprobar la orientación antes de hacer el PCB. Hay una foto de referencia arriba, así que por favor, compruébalo.
Para quien no sabe cómo hacer un PCB, usted puede encontrar aquí
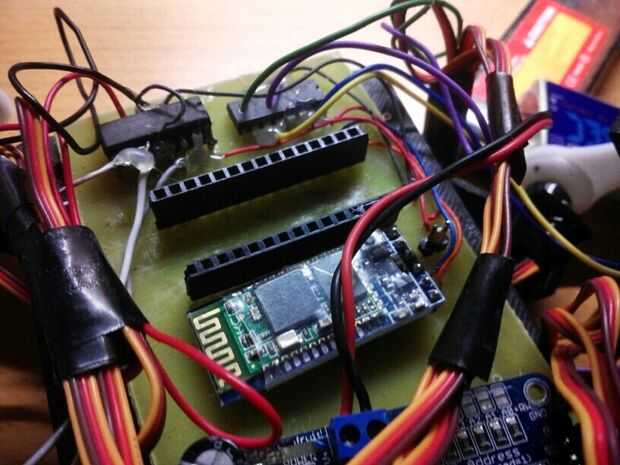
Después de hecho el tablero, puede soldar los componentes a la Junta. Te recomiendo agregar zócalo del perno de la placa Arduino. (puede referirse a la foto de arriba).
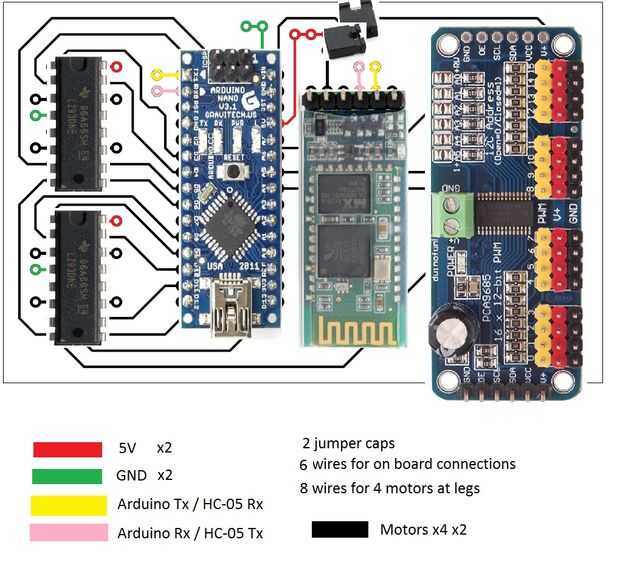
Después de soldar los componentes, conecte los agujeros a la izquierda con el mismo color con los cables y añadir puentes según las imágenes de arriba. Debe haber 6 conductores: 5V x2, terreno x2, Rx del Arduino <> – HC-05 Tx y Rx de Tx del Arduino <> – HC-05
La izquierda de 8 agujeros es para la conexión de los motores que se hará más adelante.
Luego, soldar 2 LED en paralelo con un resistor de la serie como la foto de arriba. Actúa como los ojos del robot.
Después de eso, suelde el interruptor entre el lado de entrada + del UBEC y el cable de toma de T como se muestra en la foto de arriba.
Por último, establecer UBEC a salida de 6V y conectar la salida para el controlador de servos de 16 canales como se muestra en la foto de arriba.













