Paso 6: Descargar el código para el Arduino y calibrar los Servos

Antes de calibrar los servos, tienes que subir el código a Arduino Nano.
Necesita la biblioteca de Adafruit_PWMServoDriver y enlace de descarga es aquí:
https://Learn.Adafruit.com/16-Channel-PWM-servo-driver/Using-the-Adafruit-Library
Cómo instalar Arduino biblioteca: https://www.arduino.cc/en/Guide/Libraries
Después de instalar la biblioteca, puede complie primero el código para ver si todo está bien.
Antes de conectar la placa de Arduino Nano al cable del USB, usted debe:
Retire las tapas de 2 puente en el tablero (1 es para desconectar la potencia de Bluetooth para liberar los pines de Tx Rx para USB, 1 es a desconectar el Nano de servos)
O
Enchufe a tu Arduino Nano al cargar
Una vez había terminado de cargar, puede vuelva a poner las cubiertas de 2 puentes y encienda el interruptor.
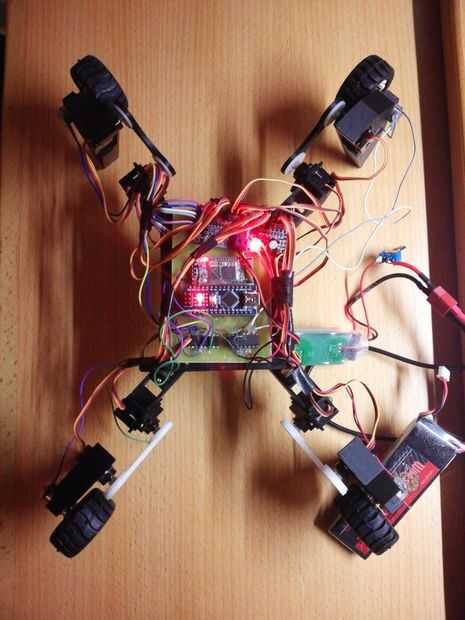
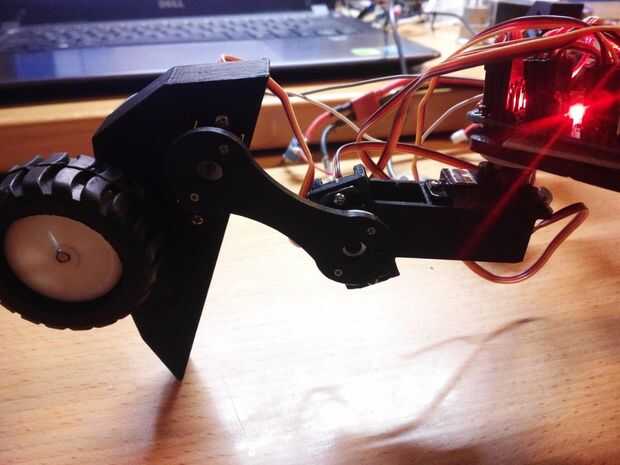
Hasta en el inicio, los servos se inicializarán a una posición "cero" y ahora puede fijar la Base, la Coxa, el fémur y la Tibia juntos como las fotos arriba, cadera 45 grados al borde de la base, fémur 30 grados a la cadera y hacer Tibia vertical y ligeramente curva fuera. Recuerde mantener la energía para que los servos mantendrá la posición "cero" cuando son adjuntarlos. En el código de Arduino, puede ajustar los valores de desvío de servo para hacer los servos tienen una posición más precisa.
Por último es utilizar cable tie a tie la batería a la Junta. Ser consciente de la orientación del cable de la batería mientras tenemos que encajar el cable en la cubierta. Usted puede referir a la foto de arriba.













