Paso 7: Programación Arduino
Hemos creado una aplicación para Android con App Inventor 2 que captará el pitch y roll datos desde el sensor de orientación android. Entonces es dividido por 3 y redondeado al número entero más cercano (Esto facilitará los movimientos Android menos sensible). Luego se transmite a través de la conexión bluetooth para el Arduino con el siguiente formato de pitch, roll/n con una coma separando los 2 enteros y terminando con el carácter nueva línea (/ n). Le mostraremos cómo hicimos ese código en el siguiente paso pero primero permite discutir el sketch de Arduino.
Para el código de Arduino descarga el archivo maze_control_bt.zip a continuación y descomprimir en el directorio Arduino. Abra el dibujo en el IDE de Arduino. Introduzca los números pitchHm y rollHm encontró en el paso 5 para hacer su laberinto cama nivel. Asegúrese de que el módulo de bluetooth no está conectado entonces conecte el ordenador a la Junta por el puerto serie y cargar código.
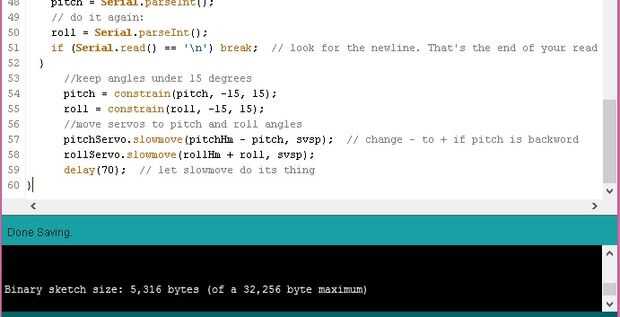
Usando el tutorial de Arduino de cadena ASCII lectura como guía construimos un bucle de bosquejo que recupera el tono y rollo formulario de datos de la conexión bluetooth. Entonces limita los ángulos a +-15 grados para mantener las cosas razonables. El bosquejo entonces mueve los servos a los ángulos de la echada y del rodillo.
FYI- Dependiendo de la forma que usted montado tus piezas de centro de cardan 2 puede que necesite cambiar a-a + en el código de línea indicada en la foto de arriba.













