Paso 5: Arduino/batería


Coloque el Arduino Uno (o cualquier equivalente del tablero le eligió) en la parte frontal del robot en donde coincide con los separadores de sobre en la parte superior de la placa principal. Atornille los tornillos de cabeza en los separadores. Sólo conseguir comenzó. No atornille los tornillos de todos lo al principio.
Nota importante: Puede que necesite cortar el pin SCL en el lado izquierdo del Arduino para que el tornillo puede caber en el enfrentamiento. El escudo PWM utilizan los pines SCL y SDA para la comunicación I2C. Sin embargo, no necesitamos eso Perno específico porque los pines SCL y SDA también están conectados a los pines A5 y A4 respectivamente.
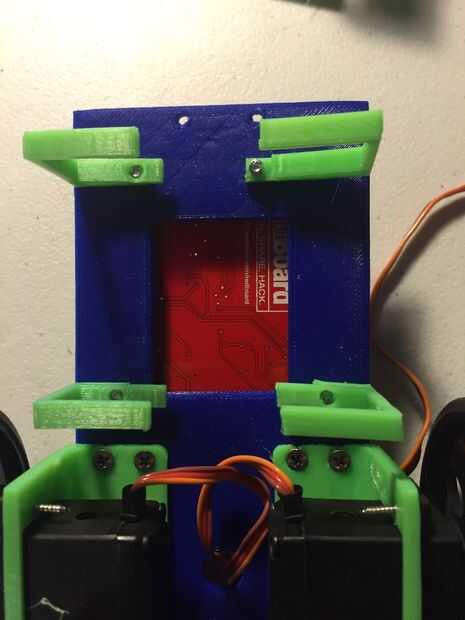
A continuación, usted necesita a (uno a la vez) pondrá los soportes de paquete de la batería debajo de la placa principal en sus respectivos agujeros. Atorníllelos en con los mismos tornillos de cabeza troncocónica de Arduino. Asegúrese de que mantenerlos en la posición correcta.
Consejo: Si se confunde sobre qué soporte va dónde, coloque la batería en su interior y buscar en la parte inferior. Si todo parece simétrico y los orificios se alineen con los orificios en la parte inferior del robot, entonces eres buena! Si no, reorganizarlos hasta que lo haga. Usted podría también el seguimiento de lo que imprimió como se denominan los archivos STL basan en sus posiciones (esto es lo que recomiendo hacerlo).
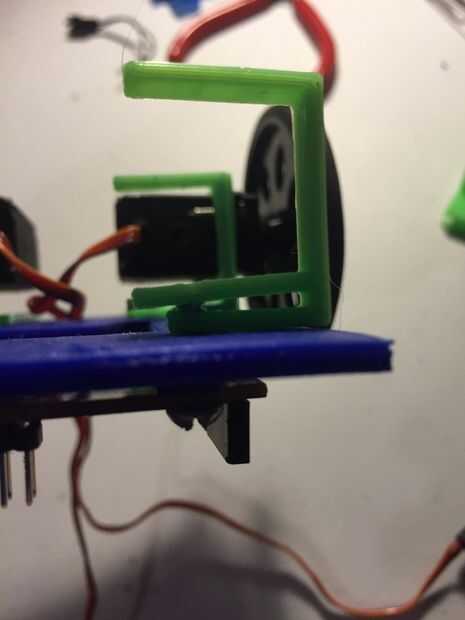
Una vez que los soportes atornillados, seguir adelante y deslice la batería a través de hasta que el interruptor golpea el borde del soporte. Diseñé estos soportes con tolerancias estrechas por lo que tendrá que jugar con ellos un poco para que la batería se ajuste correctamente. A continuación, deslice los cables por el orificio de la placa principal y tira de los extremos de los cables. Ya que estos cables van en un bloque de terminales, no hay necesidad de estañar con soldadura.
OPCIONAL: Usted puede también soldar un conector JST a los cables para que sea posible desconectar la batería.


 Básicos Arduino Robot buscador de luz!")









