
Proyecto y entregables
Quién: Audrey y millas
Qué: Hacer el XKCD "Nueva mascota" con un Arduino
Por qué: Porque tenemos que hacer un proyecto de Arduino para clase de diseño de ingeniería de la Sra. Earnhart y somos grandes fans de XKCD y robots.
Descripción de los objetivos
Construir, alambre y código de una versión transitable y funcionamiento del Robot "Nueva mascota" XKCD, menos la cámara y la autonomía. El robot será capaz de conducir en mar y tierra (con suerte). Está destinado a ser algo divertido y fresco para ver y jugar con a quien le gusta la robótica y es fan del webcomic XKCD. Este dispositivo será impresionante!
Descripción de entrega
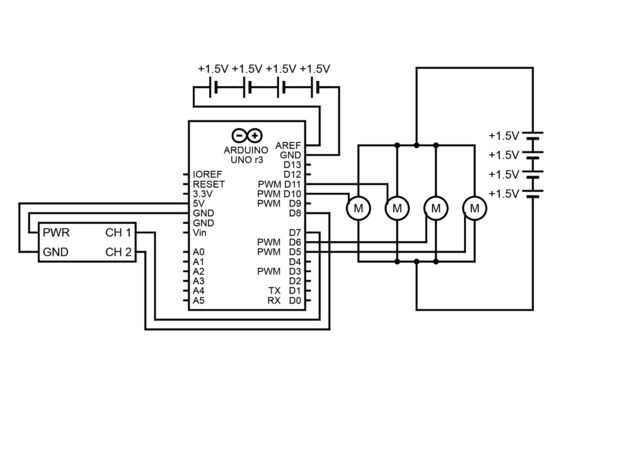
Totalmente transitable robot encerrado en una bola del ejercicio hurón grande (~ 12") o bolas de plástico similar. El cuerpo principal consistirá en un disco plano de madera con cuatro brazos que se extiende hacia fuera debajo del disco. Los arreglos de discos de arduino y la batería se montarán en la parte superior del tablero y las ruedas de omni y servos se montará a los brazos. Se ejecutará por un arduino y al menos dos 9V baterías/AA batería arreglos de discos. Movimiento se logrará usando 4 servos de rotación continua y omni ruedas que se gire la bola de plástico que el robot está dentro del. Será controlado por un transmisor de RC conectado al arduino y serán capaces de conducir en tierra y agua (esperemos).
Nota importante
Intentando completar este proyecto para clase, ordenamos un RC transmisor y receptor de dejarnos, sabes, controlan el robot. Aunque estamos publicando este Instructable porque nuestro proyecto de clase se realiza, los componentes RC aún no llegaron al correo, después de varias semanas. Planea completar el proyecto tan pronto como obtener los componentes necesarios y a publicarlo aquí, pero por ahora el robot sólo conduce al azar y no es controlable.




")




")



")