Paso 6: Cableado (eléctrico)



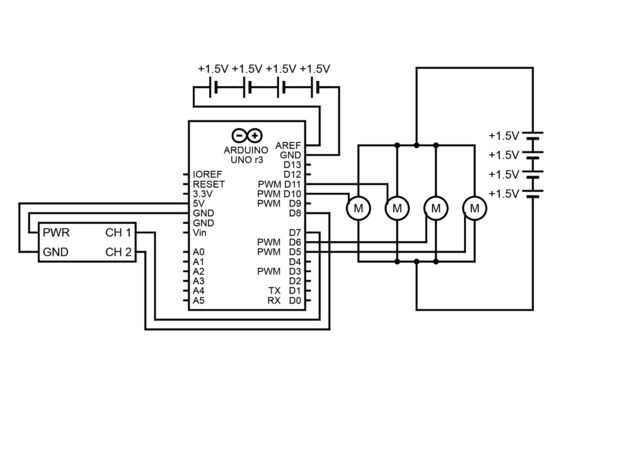
Arriba es una foto de los cables que necesitan para hacer de este bot. En el siguiente paso, tienes que ejecutar los cables de señal de PWM puertos en Arduino el receptor RC y cada uno de los servos. Sin embargo, la tarea más difícil será poder. Hicimos muchos cálculos sobre cuánto voltaje y corriente estaría corriendo a través de cada cable y llegó a la conclusión que necesitábamos 4 AAs para alimentar los servos y 4 AAs para alimentar el Arduino. Baterías de Arduino son realmente bastante fáciles de encontrar, por lo que acabo de comprar el uno anterior. Sin embargo, la batería de los servos es más complicado. En primer lugar, tenemos un portapilas para 4 AAs. Tenía un lugar para los cables, pero todos los clip-ons que encontramos tenían el cable de mal calibre, 22 en lugar de los 20 necesarios, por lo que los corte y había soldado calibre 20 en su lugar. Luego, esos 2 cables calibre 20 necesitan dividirse en 4 calibre 22 hilos cada uno, en paralelo, hacer un positivo y un terreno para cada servo. Hay una opción de si uso núcleo sólido o trenzado alambre, porque núcleo sólido se conecta fácilmente al PWM pero es difícil soldar en paralelo. Realmente dividen el alambre trenzado de calibre 20 en 4 ramas, torcido y soldar cada uno de ellos alrededor de un cable de núcleo sólido, y ellos pegan todos juntos al final. Tenemos mucho experiencia en soldadura, así que si alguien tiene una mejor solución, por favor háganoslo saber! Al final, todo había pegado en la base, había conectado los cables en el PWM proveniente de los motores, hizo un poco cables y que terminó como el cuadro acerca de. Conectar tu Arduino a la base y paquete de baterías a Arduino y se puede ir por delante y de la energía para arriba!




")




")



")