Paso 4: Conexión de componentes electrónicos
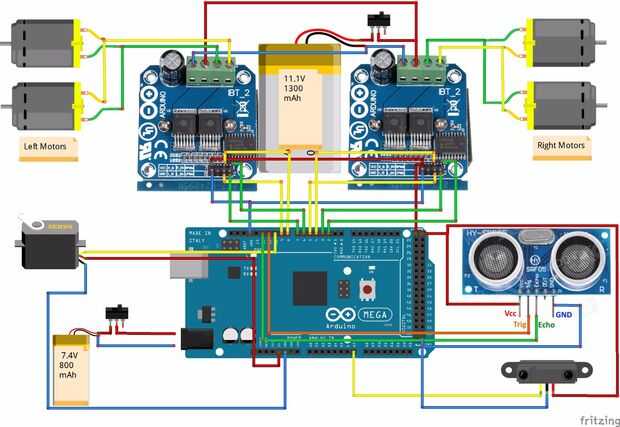
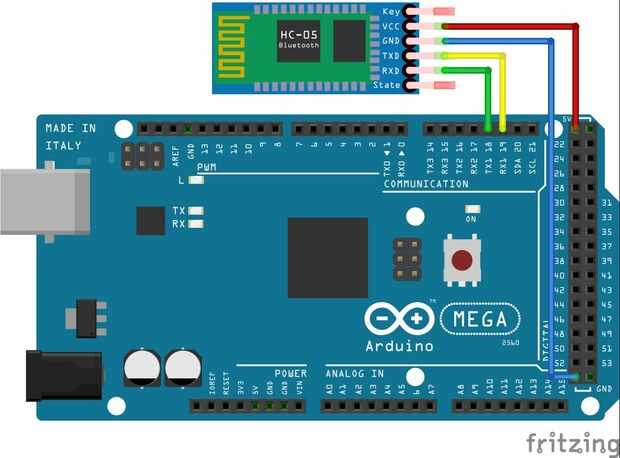
El controlador principal de este sistema electrónico es Arduino Mega 2560. Para ser capaz de controlar cuatro motores utilicé dos controladores de Motor de BTS7960B (puentes de H). Cada uno de los conductor del Motor puede ser cargado por la corriente hasta 43A que da un amplio margen de poder incluso para el robot móvil moverse sobre terreno áspero. Para el mando del robot utilicé un módulo popular bluetooth HC-05. El sistema electrónico está equipado con dos fuentes de energía. Uno de los motores de la C.C. (batería LiPo 11.1V, 1300 mAh) y el otro para suministrar Arduino, el módulo bluetooth y sensores (batería de LiPo de 7.4V, 800 mAh).
Todas las conexiones de los módulos electrónicos son los siguientes:
- BTS7960 -> Arduino Mega 2560
- MotorRight_R_EN - 4
- MotorRight_L_EN - 5
- MotorLeft_R_EN - 8
- MotorLeft_L_EN - 9
- Rpwm1 - 6
- Lpwm1 - 7
- Rpwm2 - 2
- Lpwm2 - 3
- SRF05 Sensor ultrasónico -> Arduino Mega 2560
- VCC - 5V
- GND - GND
- TRIG - 11
- ECHO - 12
- Sensor análogo GP2Y0A02YK0F IR -> Arduino Mega 2560
- VIN - 5V
- GND - GND
- VOUT - A7
- Servo -> Arduino Mega 2560
- ROJO - 5V
- BROWN - GND
- NARANJA - 10
- Bluetooth HC-05-> Arduino Mega 2560
- TXD - RX1 (19)
- RXD - TX1 (18)
- VCC - 5V
- GND - GND



 también controlado por voz")




 Básicos Arduino Robot buscador de luz!")




