Paso 3: Casi listo! Pero no del todo!


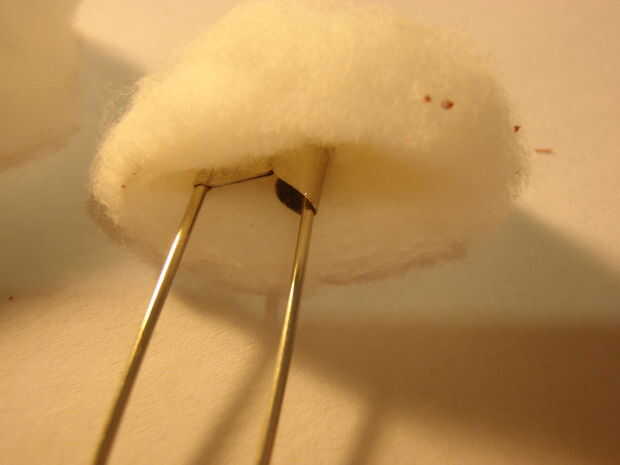




Si usted no quiere quemarse (la banda elástica no hará nada, excepto mantener los pernos de vuelo) luego tomar la bola de algodón y rasgar en dos partes. Luego, meter el pin en un "bolsillo" que cree metiendo el dedo en... algo así como cerámica... bueno supongo que es más como cottonery...
De cualquier manera, poner el perno de seguridad como en el tercer cuadro. Aplanar la cottonery y descansar el perno de seguridad en él como en la cuarta foto. Luego cinta adhesiva hacia abajo sobre el algodón con un trozo de cinta doméstica regular como en la foto quinta y sexta. Entonces, como en el séptimo cuadro, dos de ellos.
Ahora para la Asamblea.


 bricolaje - Raven poco - de menos de $6")


")






