Paso 2: Paso 2: conexión del circuito
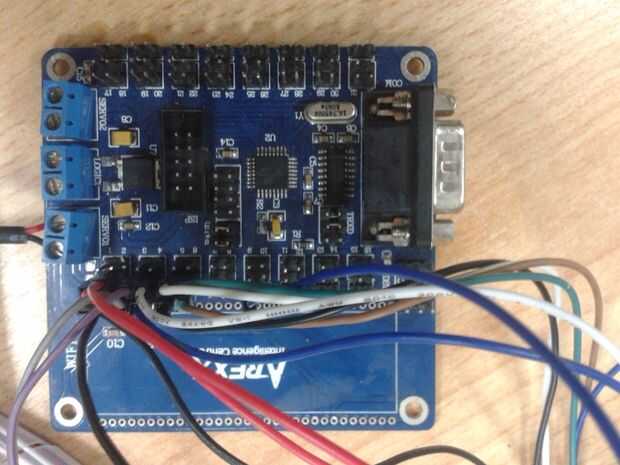
En primer lugar, la conexión del circuito del motor fue bien ilustrado en la hoja de datos de brazo antes mencionados, por lo que conectar el + ve y - ve terminales de los servos para el circuito del motor
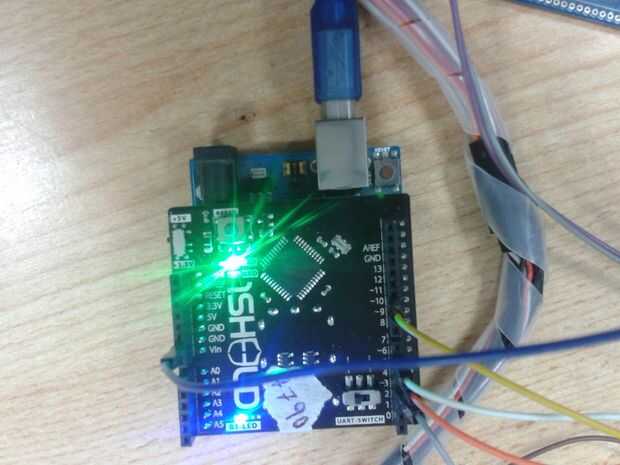
Entonces, solía Junta 1sheeled para ser capaz de usar su aplicación para controlar el robot y conectarse con ardiuno Junta.
Finalmente, conecte el terminal PWM(control) a Junta de 1sheeled conectado al arduino.
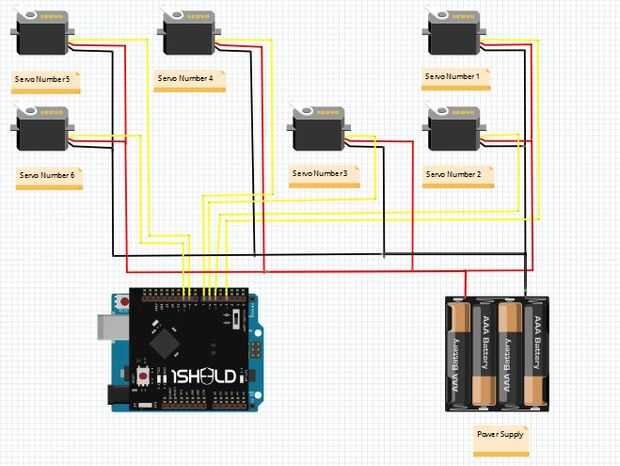
Nota: usé sólo cuatro motor debido a problema con los otros 2 motores. Así que cuando usted lo compra, simplemente añada la conexión de 2 otro control motor terminal al arduino.
Nota: Trate de grupo cables de servo del mismo y número para ser fácilmente identificado.








 con pfodApp")



")
