Paso 3: Software & electrónica

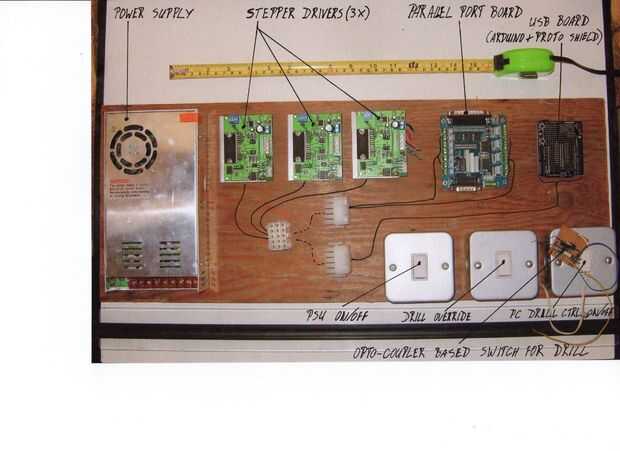
Para ser completamente flexible para fines de desarrollo, tengo dos opciones para conectar los controladores paso a paso a la PC. En primer lugar está el Arduino, que actualmente está cargado con GRBL. La segunda opción es la conexión por puerto paralelo utilizando una placa de interfaz de 5 ejes. La última opción si me permiten ejecutar LinuxCNC.
En este momento no sé cómo clasificar el software. Se preocuparán que después de haber un montaje mecánico real puedo jugar con. Algunos enlaces que he encontrado indican que no tengo que empezar de cero:
http://Kvarc.extra.hu/Step/motor/EMC/emckinematics.html
http://forums.trossenrobotics.com/tutorials/Introduction-129/Delta-robot-Kinematics-3276/






")





")
 (impresión 3D)")