Paso 2: Hablar con registros de desplazamiento y LEDs
Hay un buen tutorial en cambio se registra en la Web de arduino.
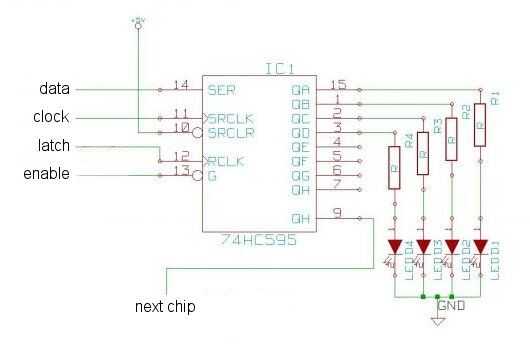
Los LEDs son conducidos por registros de desplazamiento de 8 bits de los 74HC595 tipo. Cada puerto puede fuente o fregadero de 25mA de corriente. La corriente por chip hundía u origen total no debe exceder 70mA. Estos chips son muy baratos, por lo tanto no pagan más que sobre 40cents por pieza. Como LED tienen una característica exponencial de la corriente/del voltaje, hay que ser actual limitación resistencias.
Utilizando ley de Ohm:
R = (V - Vf) / I
R = resistencia limitadora, V = 5 v, Vf = tensión directa del LED, I = corriente deseada
LED rojo tienen una tensión de unos 1.8V, gama azul y verde de 2.5V a 3.5V. Utilice un multímetro simple para determinar eso.
De color adecuada reproducción uno debe considerar algunas cosas: sensibilidad espectral del ojo humano (rojo/azul: mala, verde: buena), eficiencia de lo LED en una cierta longitud de onda y corriente. En la práctica uno simplemente toma 3 potenciómetros y ajusta hasta que el LED muestre adecuada luz blanca. Por supuesto, no debe sobrepasarse la máxima corriente de LED. Lo que también es importante aquí es que el registro de desplazamiento, las líneas de conducción debe suministrar corriente a los LEDs de 3 x 8, así que mejor no levantarse la corriente demasiado alta. Tuvo éxito con limitación de la resistencias de 270 ohms para los LEDs, pero eso depende de la marca de la matriz de LED.
Los registros de desplazamiento están interconectados con SPI serial. SPI = interfaz periférico Serial (imagen (1)).
Se oponen a los puertos serie en PC (asincrónica, no reloj de señal), SPI tiene una línea de reloj (SRCLK). Entonces hay una línea de señal que el dispositivo cuando los datos son válidos (chip select / cierre / RCLK). Finalmente hay dos líneas de datos, uno se llama MOSI (amo a esclavo en), el otro se llama MISO (maestro de esclavos hacia fuera). SPI se utiliza para interconectar circuitos integrados, al igual2C. Este proyecto necesita MOSI, SRCLK y RCLK. Además se utiliza también la línea de enable (G).
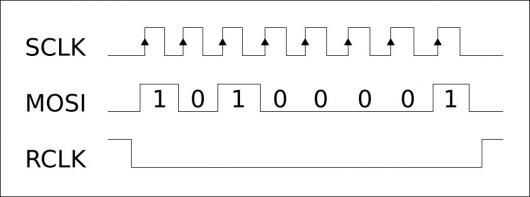
Se inicia un ciclo SPI tirando de la línea RCLK a baja (imagen (2)). El MCU envía sus datos en la línea MOSI. Se muestrea el estado lógico de la misma por el registro de desplazamiento en el borde de levantamiento de la línea SRCLK. El ciclo se termina tirando la línea RCLK a alta. Ahora los datos están disponibles en las salidas.












![Mod [RGB LED + Arduino Uno] del caso](https://foto.askix.com/thumb/170x110/7/0e/70e25aa732511b78a1c6b50a1da1ae18.jpg "Mod [RGB LED + Arduino Uno] del caso")
