Paso 12: 9 DOF Firmware y calibración
El código final para la Junta se puede encontrar en github (haga clic en el botón en forma de nube para descargar). Mayor parte de esta fue escrita por Peter Bartz Sparkfun IMU, sólo he modificado esto para trabajar con el LSM303. Abra el archivo Arduino >> Razor_AHRS >> Razon_AHRS.ino y subirlo a la Junta. Este código toma los datos en bruto de todos los sensores, filtra y combina para calcular el pitch, yaw y rodar. Haga clic en el Serial Monitor para ver el tono sin calibrar, yaw, roll (mi salida de tablas se muestra arriba).
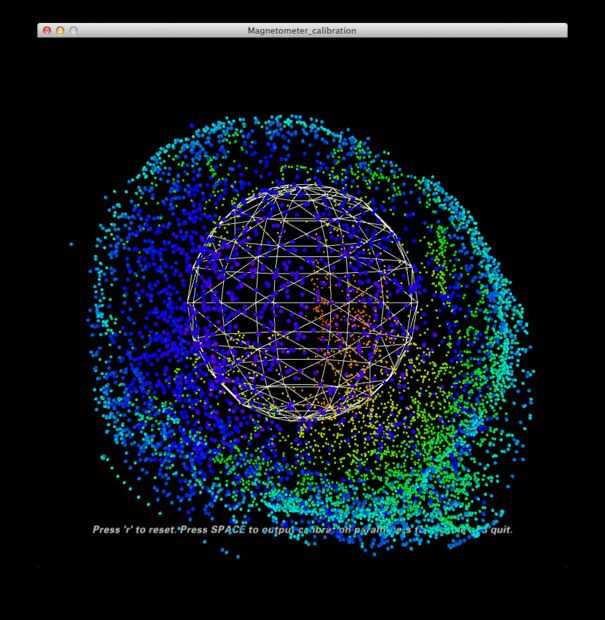
Calibración es muy importante si quieres esta placa para funcionar de forma óptima. Aquí está mi consejo sin calibrar enganchada a un esquema de tratamiento:
Y aquí es después de la calibración (calibración de no hace una gran diferencia para mí, pero que para usted):
Los pasos restantes de la calibración pueden encontrarse en Peter Bartz tutorial aquí.


")






")



