Paso 2: motores





Vamos a empezar con los motores.
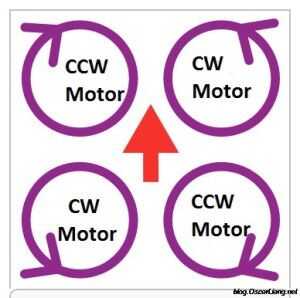
Algunos motores tienen (derecha) CW y CCW (sentido antihorario) rosca del eje del apoyo. La diferencia es que la orientación del hilo de rosca en el eje de la hélice es lo contrario. Que significa una tuerca de la hélice puede fijarse girando hacia la derecha, y la otra tuerca de apoyo hay que girar la otra dirección. Esto llaman 'Bloqueo del uno mismo', porque en un quadcopter tenemos 2 motores giro dirección CW y los otros dos giro izquierda. Como los motores están girando, las tuercas de apoyo automáticamente se apriete y no soltarse.
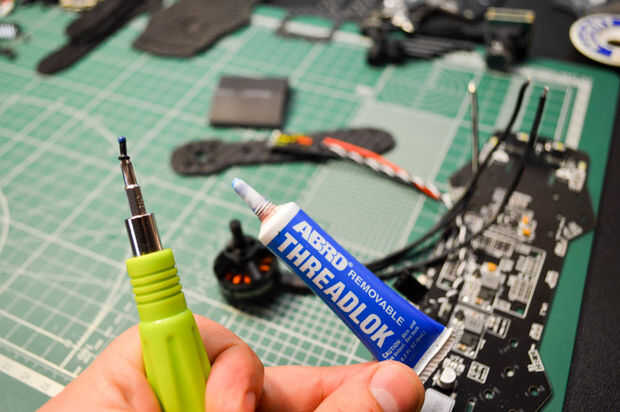
Permite montar a motores en los brazos, te recomiendo usar una hilo de rosca, cerradura de mejor media (azul). (No utilice el rojo se o nunca podrá deshacer los tornillos más adelante)
Tenga cuidado al apretar los tornillos, a veces los tornillos sacar los cables dentro del motor y pueden causar un corto circuito y dañar el motor, puede utilizar una arandela de plástico o metal. (Insertar imagen).
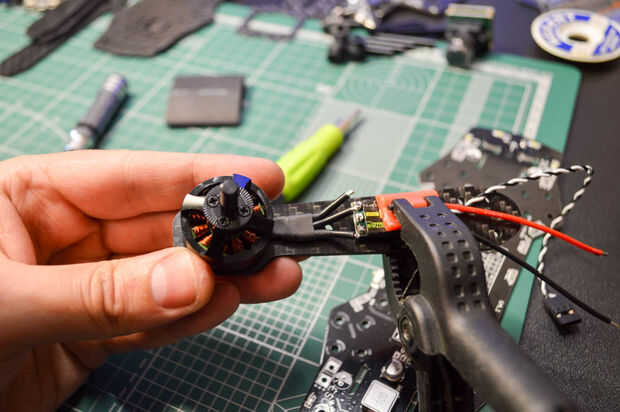
Corte de cables extras, quitar la capa del aislamiento de los cables de corte de pice srink tubo de ESC, utilice un fundente y soldadura. Desoldar los cables de salida y conecte los cables del motor al ESC.
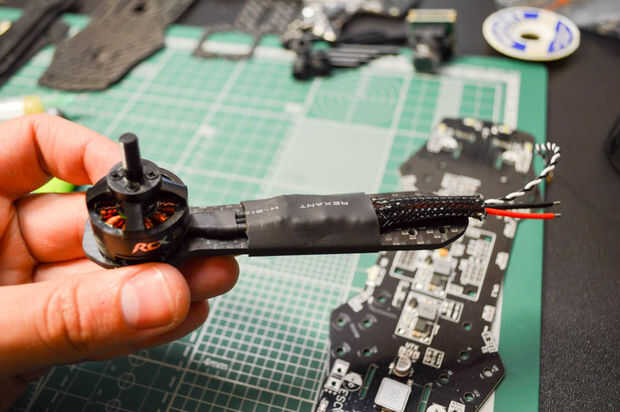
Utilice tubo de calor srink para fijar ESC en el brazo. Algunos ponen la ESC en el marco. Te aconsejo que no hacerlo, ESC calentamiento durante el funcionamiento y necesitan de refrigeración. No hay colling dentro del marco y ESC a menudo se quema.
Puede conectar los cables para los 4 ESC de la misma manera y luego en traje de BLHeli cambiar el sentido de giro para motores de 2.





![DIY FPV RC tanque V2 [mejora del rango de 2km!]](https://foto.askix.com/thumb/170x110/9/98/9986a20bc71e50cae416b8021858985b.jpg "DIY FPV RC tanque V2 [mejora del rango de 2km!]")






