





Inicio de la resistencia presenta su proyecto Selfibot.
Selfibot es un soporte para un teléfono/tablet con la función "Sígueme". Si el usuario cambia su posición el teléfono sigue él. Así, hablar por Skype puede caminar en la habitación y todavía mantenerse dentro del campo de visión de su interlocutor.
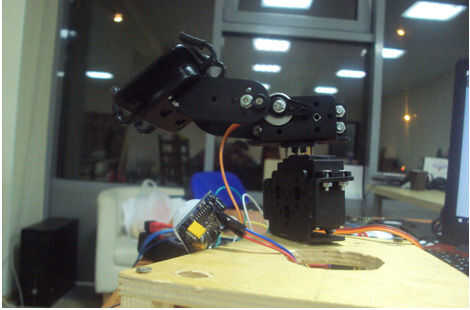
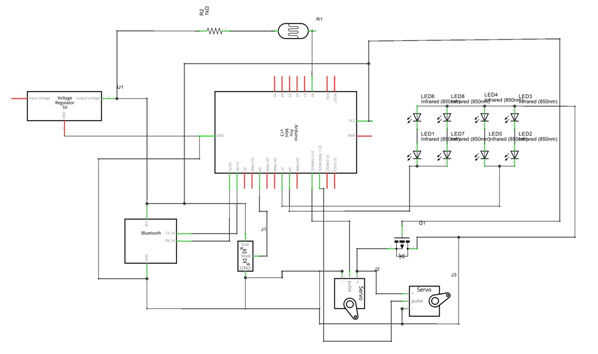
El dispositivo utiliza servos TowerPro MG995 y МК Atmega328 como controlador. El controlador está conectado con módulos Bluetooth HC-06, el movimiento y sensores de luz. El dispositivo también está equipado con iluminación infrarroja para permitir la operación normal de luz suficiente, un bloque de baterías de iones de litio con la capacitancia total de 2600 alimentación de мАhrs y media de 7,4 v. Al mismo tiempo para asegurar la correcta carga y descarga del bloque montado en el dispositivo, que contiene un controlador correspondiente de balanceador de la carga y el puerto USB para recarga de dispositivos externos y un enchufe de alimentación eléctrica vía el adaptador.
Cuando el dispositivo está en estado de inactividad, el Arduino, sensores de movimiento y HC-06 funcionan. Ningún poder se aplica a los servos. Pero cuando comienza la transmisión de datos Bluetooth o algún tipo de movimiento se detecta dentro de un radio de 7 metros, el aparato alimenta los servos con 5-6 v; se genera un cierto impulso para cambiar la posición del teléfono/tablet en la base del dispositivo. Si el titular sigue siendo pasivo de 10-20 minutos, el suministro de energía eléctrica a las paradas de los servos y el dispositivo se va a dormir.
En adquisición de paquetes de datos los servos están moviendo en la dirección determinada hasta que se recibe un comando para cambiar la dirección o cualquier otro comando. En la última versión del dispositivo de los servos moverse suavemente gracias a la adición de parámetros de velocidad máxima para el comando. MК también lee los datos de sensor de luz. Si los datos recibidos excede el valor umbral, el sistema se inicia al energizar los diodos infrarrojos.
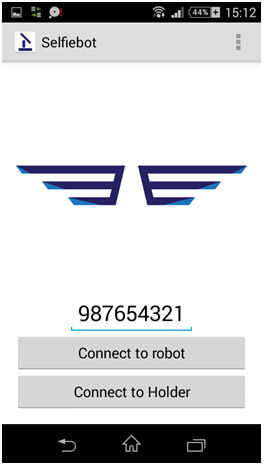
Para Selfibot que necesita para ejecutar el programa de control en su teléfono/tablet de control montado en la base del dispositivo. SelfieBot está conectado con el teléfono/tablet vía Bluetooth.
La interfaz de programa de control
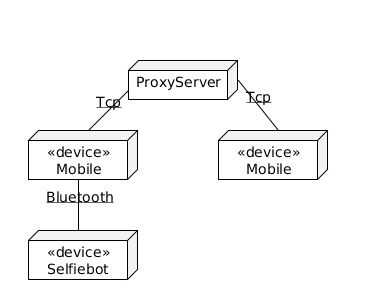
El Selfibot control de acceso se concede a través de fileserver. El teléfono en el SelfieBot y el teléfono del interlocutor deben conectar a este servidor y el log-in "S" se agrega a la entrada de la SelfieBot y la "G" – para el inicio de sesión del teléfono control.
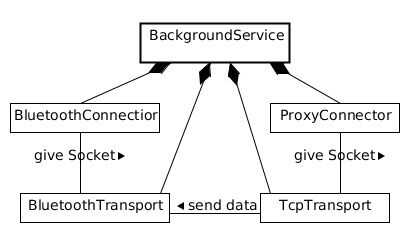
El proceso de SelfieBot conexión vía Bluetooth y la distribución de control tienen lugar al mismo tiempo. Es sólo una de las claves "Conectar el titular" para el usuario. Después de la conexión exitosa todos los transportes tratan de línea y transmisión de mensajes entre sí directamente. El SelfieBot Service inicia transmisión fecha Bluetooth e Internet. Los SelfieBot Service se inicia a un lado (casi a un lado) desde la aplicación principal. En los transportes de iniciación del servicio debe conectarlos directamente.
En Java nos conectamos dos corrientes en un hilo a través del mecanismo de transmisión del mensaje.
Como lo considera que demasiado complicado una tarea para crear al Mensajero que transmite video, decidimos desarrollar una aplicación compatible con cualquier messenger. Por esta razón el control de Selfibot aprox. ocupa mínimo espacio.
Por lo tanto, para utilizar Skype y controlar SelfieBot es necesario trabajar con dos aplicaciones a la vez.
Existen varias soluciones de esta tarea. Hemos decidido contra el uso de otras bibliotecas como podrían surgir problemas en el caso de la utilización de la aplicación con fines comerciales.
Decidimos crear un joystick transparente colocado sobre la pantalla.
Los requisitos de joystick:
1. se coloca por encima de todo las ventanas.
2. todo fuera de la palanca de mando es clickable.
3. la palanca de mando puede ser minimizada y restaurada.
4. puede ser arrastrada por la pantalla.
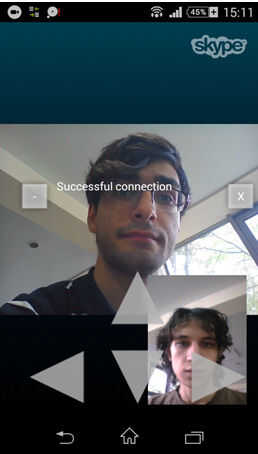
La interfaz de control de SelfieBot durante una llamada de Skype.
El joystick está por encima de la pantalla y puede ser derrumbado.
A pesar de la simple construcción, nos encontramos con una serie de sutilezas. En algunos modelos Android no podríamos hacer las teclas transparentes así que tuvimos que dibujarlos.
En Indigogogo comenzamos una multitud de fondos de campaña para recaudar fondos para la producción. En comparación con la Junta de referencia tendrá el nuevo modelo:
-una mejor interacción con el fileserver;
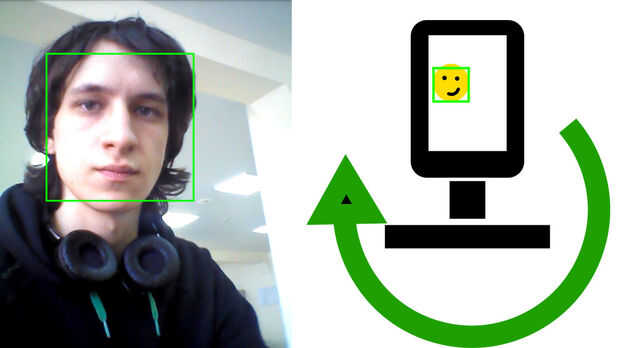
-un control autónomo del titular mediante la función de "reconocimiento de la cara";
-SelfieBot control a través del navegador;
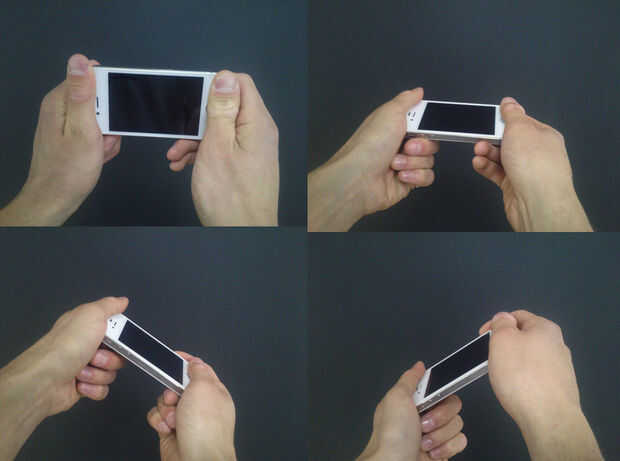
-SelfieBot control mediante el acelerómetro del teléfono (rotación, ángulo de izquierda a derecha, etc..)
-Para más información ver github (https://github.com/deadtr/SelfieBot/milestones).
Campaña IndieGoGo todavía está allí: http://igg.me/at/selfiebot









")



