Paso 1: Paso 1: construir el escudo del Motor (o comprar uno y omitir este paso)
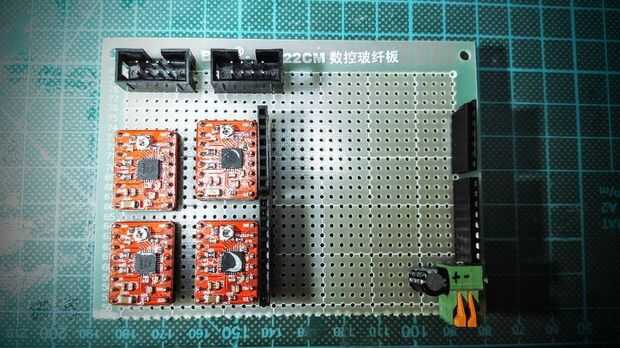
Coloque los componentes en la placa de soldar. Tratar de encontrar una buena combinación para que facilita la soldadura. La pololus se pondrá encima de pins hembra: si quema, puede sustituirlos fácilmente.
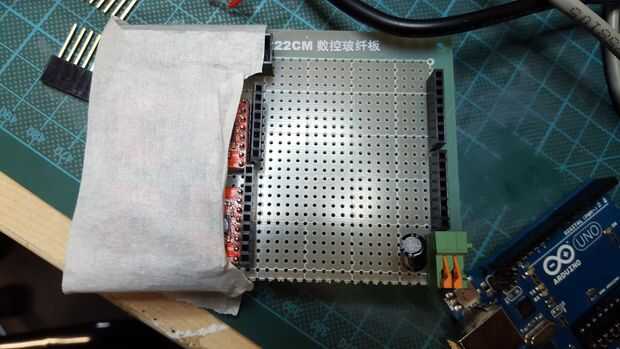
Antes de todo, compruebe que el arduino y chip ajuste en los pernos de fijación.
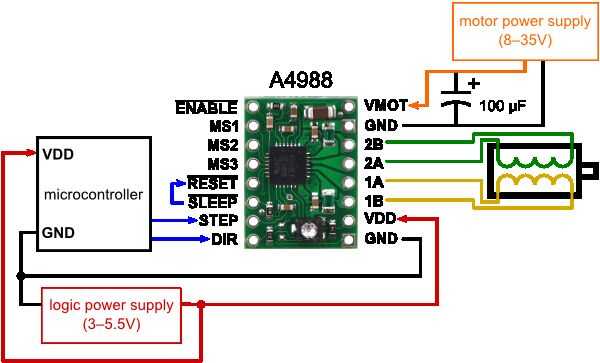
El condensador va en paralelo a la entrada de 12 voltios: condensador + va conectado con 12V, condensador - va a tierra.
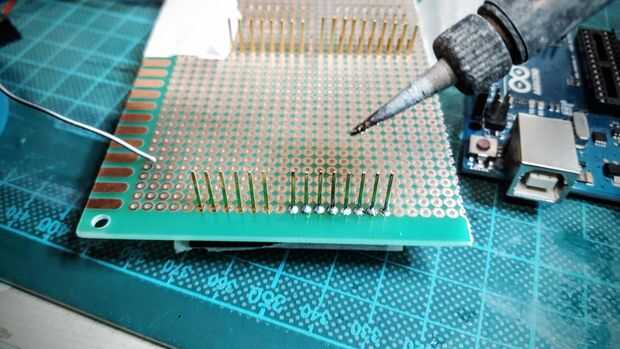
Una vez cada cosa en su lugar, cinta con cinta de enmascarar, devolver la placa y soldar los pines (Esto mantendrá tipo de constante). Un buen truco para tener las patillas soldadas directamente es soldar el pin de la primera y la última.
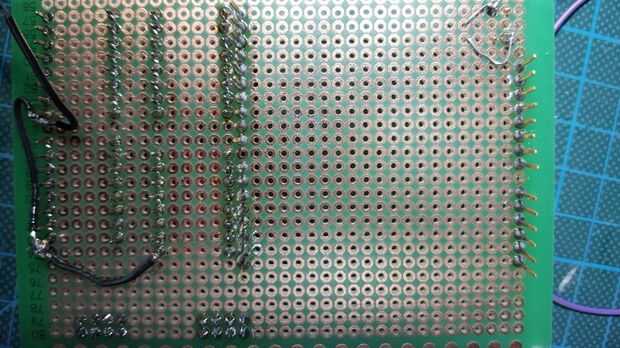
Una vez finalizado este paso, usted tendrá que soldar los cables de los conductores de pololu: esto es el infierno y toma para siempre, estar preparados.
Monte su arduino y visualizar donde el número de sus pines. Lo mismo para el chip.
Revise la hoja de datos. Para este escudo, conecté todos los bolos de micro-escalonamiento de la pololus a los mismos pines de arduino: 10, 11 y 12. Que utiliza alfileres 2 a 9 para el paso y la dirección (1 chip: paso dir, pin2 - pin3 / / 2 chip: pin paso - pin4, dir - 5... etc). RESET y sueño están conectados juntos. Tienes dos motivos en el chip, se pueden conectar juntos y luego a la tierra principal.
Empezar a conectar un chip, luego la otra, es la forma más sencilla.
Compruebe sus conexiones con un multímetro. Si algo sale mal, revise que todo lo que debe conectarse es sonar. También comprobar que lo que no debería estar conectado no emite pitidos. Preparar una lupa!
Añadir un código simple y conectar sus motores para comprobar que sus motores están funcionando:
#include < AccelStepper.h >
AccelStepper M0(A5, A6, A7);
AccelStepper M0(1, 3, 2), M1 (1, 5, 4), M2 (1, 7, 6), M3 (1, 9, 8); paso, dir
en lugar de llamar M1(1,3,2)
AccelStepper M [] = {M0, M1, M2, M3};
int ms1 = 12, ms2 = 11, ms3 = 10; declarar pines versión micro (todos los módulos tienen los mismos pernos de ms)
void setup() {}
pinMode (ms1, salida);
pinMode (ms2, salida);
pinMode (ms3, salida);
MicroStepping en baja permitirá a golpear con más fuerza en el tambor
digitalWrite (ms1, LOW);
digitalWrite (ms2, LOW);
digitalWrite (ms3, LOW);
}
void loop () {}
para (int i = 0; i < = 3; i ++) {}
retrasar (1000);
M[i].setMaxSpeed(10000);
M[i].setAcceleration(100000);
M[i].Move(50); parcourir à de distancia (en n ' est pas encore parti) / /
mientras que (M[i].distanceToGo() > 0) {}
M[i].Run(); en el avance d ' un pas
}
retardo (temps); tambor de le de la sur "peu ONU si la baguette reste" / / / /
M[i].Move(-50); parcourir à de distancia (en n ' est pas encore parti) / /
mientras que (M[i].distanceToGo() < 0) {}
M[i].Run(); en el avance d ' un pas
}
}
}













