Paso 5: Tres tipos de actuador diseño SMAs
(Aquí te quiero agradecer mi artista / ingeniero mecánico amigo Paolo Salvagione por su ayuda en el diseño de varios Actuadores SMA: http://salvagione.com/)
Uno de los retos en el diseño de un sistema dinámico con SMAs o flexinol es que a diferencia de los servomotores que se pueden controlar sus movimientos y la ubicación, tienes menos control de su movimiento. Un control preciso de la posición del SMA es posible pero no tan fácil.
Uno de los principales inconvenientes con los alambres de la SMA es que su enfriamiento y calefacción curvaturas no son iguales. Básicamente tienes que esperar a que el material se enfríe. No basado en el siguiente trabajo, trabajo con Actuadores SMA allí es ningún modelo que prescribe la temperatura, la carga y la geometría material para un desempeño deseado; por lo tanto, la Convención debe derivar propiedades de thermo-mecánico del modelo de un actuador experimental, ya sea parcial o totalmente: (https://micro.seas.harvard.edu/papers/SMS10_Paik.p...)
El siguiente trabajo explica este problema en detalle y ofrece refrigeración activa y sistemas de presfuerzo para superar el tiempo de respuesta de SMA: http://www.utdallas.edu/~ytt110030/data/SMA.pdf
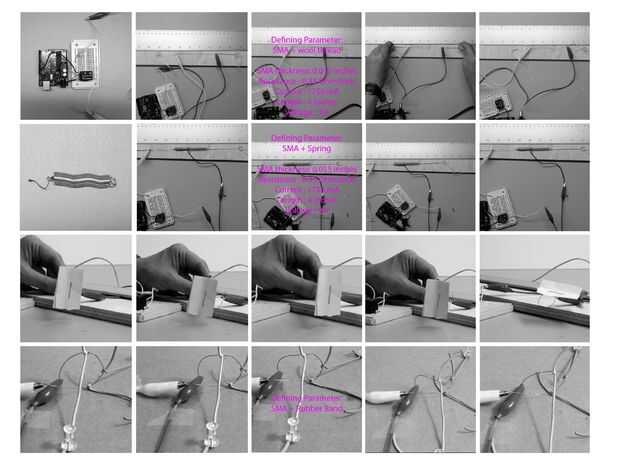
Basados en esto, me gustaría sugerir que hay tres maneras que usted puede diseñar un actuador SMA:
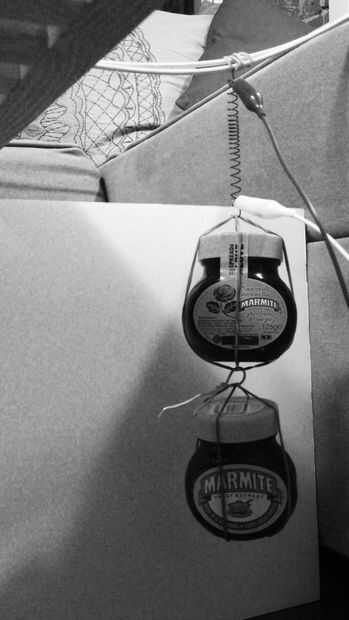
1) usando peso / gravedad para SMA
Puede usar gravedad simplemente añadiendo peso a su actuador SMA. Esto es una gran manera para levantar materiales. Dicho esto, este es un proceso experimental que requiere prueba y ensayo para entender la fuerza necesaria para retraer el cable SMA / detrás del resorte. O posiblemente si usted puede encontrar la hoja de datos de SMA le puede calcular la fuerza exacta que SMA puede levantar hacia arriba.
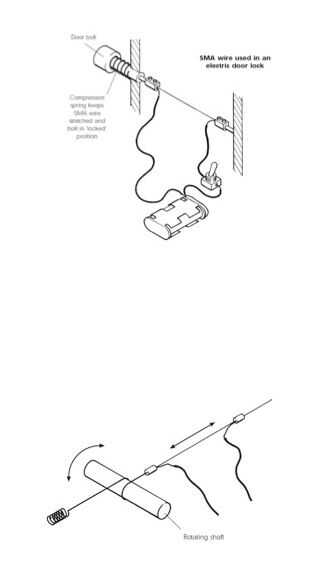
2) utilizando una fuente sesgada
También puede utilizar una fuente sesgada para empujar al SMA en su estado estirado.
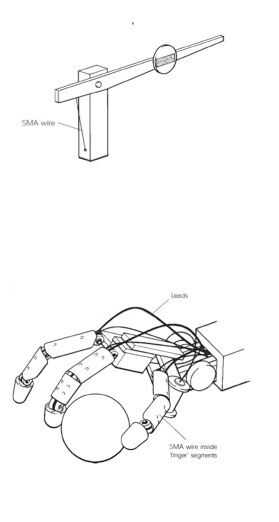
3) utilizando propiedades de los materiales
El comportamiento material juega un papel importante
en este método de almacenar y liberar energía de flexión durante el calentamiento y el enfriamiento fases del cable SMA. Por lo tanto puede ayudar el proceso de retracción. Las propiedades mecánicas del material que es inherentemente elástico se aplica una tensión inicial en el cable SMA. Por lo tanto, por el alambre de la calefacción, los contratos y produce curvatura adicional en la estructura. Si la estructura tiene también elasticidad para empujar el SMA se extendía entonces esto sería un proceso mucho más rápido. Este fue el principal foco de estudio de sistemas celulares en este proyecto.

 mediante el método de luz LED de UV.")




")




")

