Paso 1: Alambre, probar y montar el sensor
El sensor automático de nivelación será reemplazar su impresoras 3D z-tope en su tablero de control. No necesita la antigua parada de z porque el sensor se sondeo la cama de la posición z.
Asegúrese de que su sensor tiene una distancia de detección de al menos 4mm. En realidad, puede ser menor dependiendo del material sensor. El sensor debe ser montado cerca de la boquilla y capaz de llegar a cerca de las esquinas de su cama de impresión cuando se montan. Hay un video rápido por la guía de Tom que incluye configuración y modificar el sensor si tiene el LJ12A3-4-Z/BX (punta azul) o averiguar el tuyo requiere modificación de la tensión.
El sensor mencionado en este indestructible tiene un LED que se enciende cuando se activa. Podría ser tenue o no luz en absoluto si el sensor no está recibiendo suficiente voltaje.
Para el montaje, diseño 123D es perfecto diseño thingiverse.com y por supuesto, objetos simples como esta.
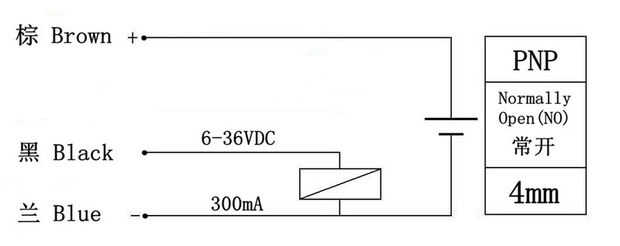
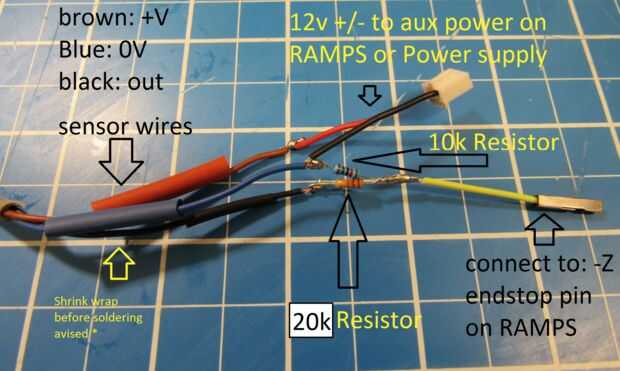
Cableado el Sensor de proximidad inductivo de la LJ12A3-4-Z/por :
1) ubicar y desconectar la sonda de z de su tablero de control.
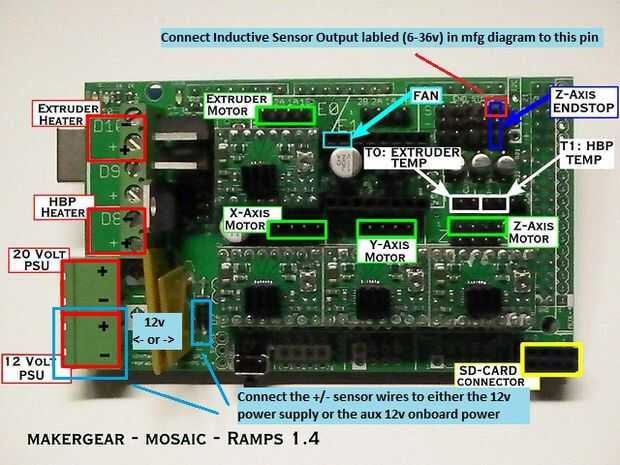
2) Conecte el cable salida de voltaje (etiquetados como V-out [brown] en este caso) a la señal de S de la entrada en la misma fila de 3 pernos de que su edad tope de z fue conectado. En tableros rampas este pin es más cercana a la parte exterior de la Junta de las filas de clavijas de tope.
3) Conecte los otros 2 cables marcados + y - a una fuente de energía positiva y negativa correspondiente en su tabla. Esto puede ser directamente a la fuente de 12 alimentación, donde 12 v se conecta a la placa o, puede utilizar los pernos auxiliares de 12v en el tablero de rampas. (Ver diagrama de rampas).
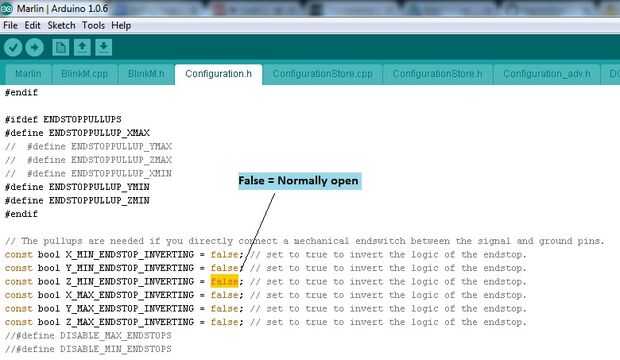
4) los sensores mencionan aquí son switches "normalmente abiertos" lo que significa, esa señal sólo se envía a la Junta cuando se dispara. Puede que necesite comprobar esta línea en su firmware. False = normalmente abierto (véase el cuadro) o CTRL + F buscar "Z_MIN_ENDSTOP_INVERTING" en el Arduino Sketch. (más acerca de firmware en el siguiente paso)
5) prueba el sensor de algún metal, aluminio, cobre, etc.. El LED debe encenderse. Para una prueba final, tiene la desconexión de la energía de la impresora / parada práctico por si acaso y levantar el eje manualmente a una altura segura e inicio el eje z (o todos los ejes) y tratar de activar manualmente el sensor inductivo mientras que está por encima de la cama de impresión. Si funcionó como su tope edad, está listo para montar el sensor y configurar el firmware.
Diseñar un montaje de sensor y elegir puntos de nivel
Estos sensores sólo una distancia de detección de ~ 4 mm. idealmente, el soporte del sensor debe ser ajustable desde un lugar que es más bajo que la punta de la boquilla a unos milímetros por encima. El desplazamiento del eje z se puede ajustar en su gcode más adelante. La posición ideal para un sensor de 4mm podría ser más alto que la boquilla unos 3mm. Configurar el sensor mucho más bajo que el inyector al principio para evitar que se caiga la cama.
Monte el sensor y mueva su carro extremo caliente a 4 puntos y 4 piezas de cinta de papel (o cobre) en lugares más cercano a las 4 esquinas de la cama de impresión que puede alcanzar el sensor. Podría ayudar a colocar grandes piezas temporalmente hasta que ajuste exactamente donde se van. Debe tener al menos 1 a 2 cm² de cinta para estos sensores cuando termine.
* Plástico pegado en la boquilla puede a veces evitar sondaje y causar crashing.* de cama
Limpie o Precaliente su extrusora antes de autoguiado hacia el blanco o la auto-nivelación para evitarlo.
Siguiente paso: configuración de Firmware-->


")










