Paso 2: Instalación de Firmware (Marlin) para la Auto-nivelación
Pase al # 5 Si usted está familiarizado con Configuration.h en Marlin
1) Descargar instalar el IDE de Arduino y obtener la última versión de Marlin o su impresora MFG disponible la versión que tiene autonivelación en el archivo Configuration.h.
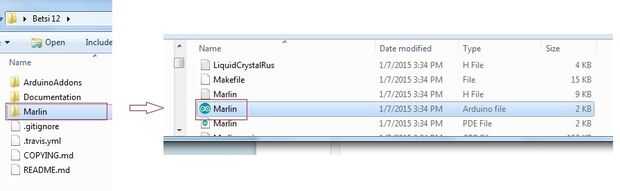
2) Naciones Unidas-zip el Marlin contenido en cualquier carpeta especialmente nombrado.
3) abrir la carpeta "marlin" y haga doble clic en el archivo "Marlin" Arduino para iniciar el IDE de Arduino sketch editor. Si esto no funciona puede abrir el IDE de Arduino y vaya a archivo > abrir y seleccione el archivo marlin marlin.
4) con el bosquejo de Marlin abierto haga clic en la ficha [Configuration.h]. Esto es donde todas las opciones son para configurar su impresora 3D desde cero así como configurar la característica de autonivelación.
***************
A continuación cubre configuración de firmware para la nivelación del punto 4.
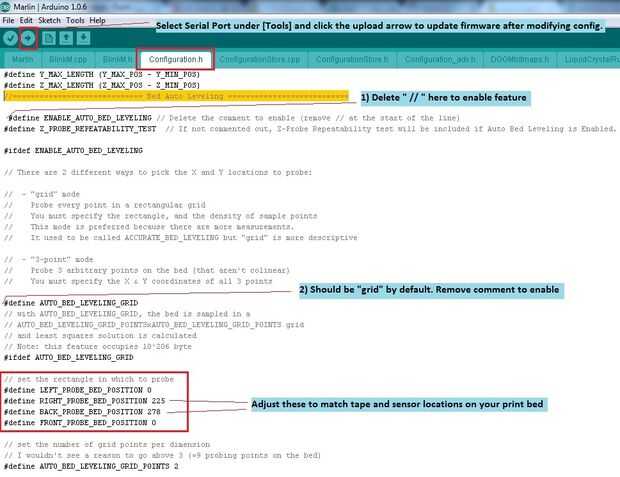
5) Desplácese hasta la sección de etiqueta: "Cama de Auto nivelación". Activar mediante la eliminación de "/ /" al inicio de la línea. (ver comentarios de firmware de marlin y captura de pantalla anterior. 4 puntos de nivelación está activado por defecto.
6) ajustar las coordenadas de posición para que coincida con la ubicación de la cinta de papel sobre la cama de impresión.
La posición de las coordenadas puede ser un poco confusa. En este ejemplo, izquierda y frente se establecen en cero debido a la posición inicial es de 0,0 en la impresora. DERECHO es la siguiente posición de sondeo. Medir hasta qué punto tus viajes de sensor en el eje X (izquierda y derecha generalmente) a la siguiente pieza de papel con cinta y utilizan este número (en mm) para comprobar la posición correcta. Lo mismo para la parte posterior (eje y). Aquí está un ejemplo de mi configuración.
#define LEFT_PROBE_BED_POSITION 0
#define RIGHT_PROBE_BED_POSITION 225
#define BACK_PROBE_BED_POSITION 278
#define FRONT_PROBE_BED_POSITION 0
En el ejemplo anterior, la impresora sonda las ubicaciones siguientes en este orden:
X0, Y0
X225, Y0
X225, Y278
X0, Y278
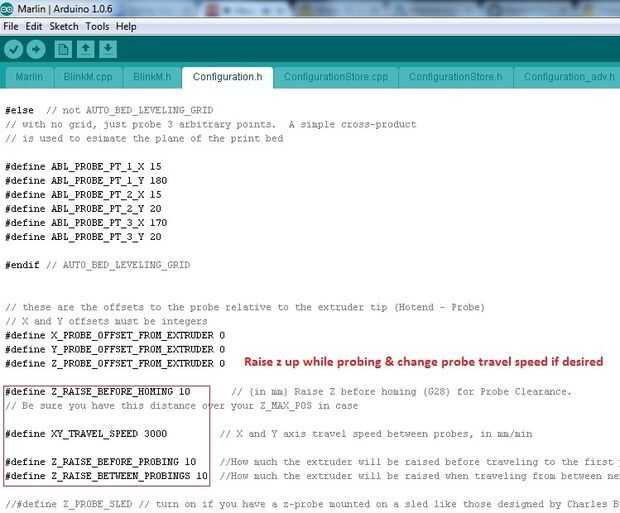
* Opcional * fijar la sonda a levante entre cada sondeo. (ver pantalla de tiro)
7) archivo > Guardar, a continuación, actualizar el firmware, conectando la placa a través de USB y haga clic en el botón de flecha. Si es la primera vez que haya conectado su rampas y firmware actualizado, unos driver se instala y se reinicia puede ser necesario.
Siguiente paso: Autonivelación empezar gcode G29-->


")










