Paso 1: Kit: piezas, componentes y periféricos




Se utilizó el kit ST360 ARF Quadcopter comprado de Amazon por unos $200 con impuestos. Si es tu primera construcción, o no tienes alguien guiarles a través de la electrónica codificación, recomiendo usar un kit listo para volar (RTF) y hay que ir con el controlador de vuelo incluido. Más adelante puede conseguir un microcontrolador independiente para control inalámbrico o autónomo y, si es compatible con la placa, utilice el transmisor inalámbrico incluido. También, recomiendo comenzar con un micro helicóptero. Usted puede conseguir un kit de 250 para baratos y son muy estables y pueden aprender los fundamentos de controlar el helicóptero. Usted querrá algo de práctica antes de comprar en más caros accesorios y motores y todo eso.
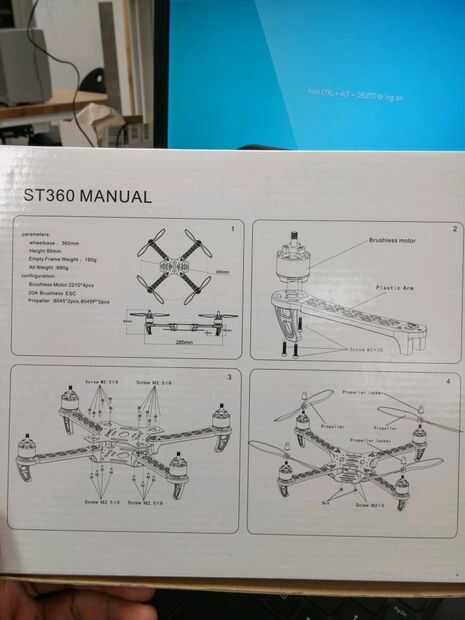
Nuestro kit vino con cuatro CES, 2 apoyos CW, 2 apoyos CCW, 4 motores, un chasis y un controlador de vuelo.
No pude encontrar las especificaciones en el CES, aunque determinamos responden a anchuras de pulso entre aproximadamente 25 ms y 1.5 ms. discutir el PAC y sus capacidades PWM en un paso posterior.
Los apoyos CW están marcados con sus dimensiones 8045, mientras que los pilares de la izquierda están marcados P 8045, donde 'p' es prop "pusher" que es lo que muchos aficionados llaman los puntales de la CCW.
Este kit tiene 8045 apoyos, significado de 8 pulgadas de diámetro con campo de 4.5 pulgadas. Básicamente, el diámetro de una hélice determina la agilidad del helicóptero: apoyos más cambian velocidad más lentamente, pero son mucho más estables. Además, el tono determina la cantidad de aire desplazado con una vuelta de la hélice. Por lo tanto, una mayor longitud de paso requerirá más energía eléctrica corriendo a través de los motores a una velocidad dada.
Los motores son KT2210 que son clasificados en 1050kV. Esencialmente, el kV es la proporción de voltaje: rpm; 1 voltio conducirá el motor a 1050 rpm. Porque las dimensiones de la hélice afectan la cantidad de esfuerzo de torsión que del motor puede aplicar, es necesario a la par de los motores con una hélice de tamaño adecuado. Aquí están algunos recursos para ayudar si desea seleccionar su propia configuración de motores/accesorios:
Empecé aquí:
http://www.tomshardware.com/Reviews/multi-rotor-qu...
Luego, hice un barrido amplio a través de un montón de búsquedas en google y /r/quadcopter. Entre mi comprensión de la física subyacente y las recomendaciones de estas fuentes, creo que motores más grandes tienen menor kV calificaciones y típicamente se presenta con grandes hélices y pueden levantar cargas más grandes, pero no puede cambiar la velocidad rápidamente por lo que no son particularmente ágiles. Motores más pequeños están emparejados con los propulsores más pequeños y no pueden llevar tanta carga, aunque sean mucho más ágiles que las configuraciones más grandes. Además, hélices más grandes requieren baterías de mayor capacidad.
Las pilas usadas en las configuraciones más multicopter son baterías de litio polímero, o LiPo. La capacidad de una batería viene determinada por la corriente nominal multiplicada por la capacidad de carga. Por ejemplo, una batería nominal de 2200 mAh a 20C tendrá capacidad total 44000mAh. El número de S es el número de células en la batería, donde cada célula tiene en promedio 3.7 V. El más común es el 3S 11.1V que. La mayoría construye utilizará 2-3 y entre 1200-2200 mAh.
Algunos periféricos que desee buscar en son una IMU (unidad de medida de Interrail) y un transceptor de receptor inalámbrico. La IMU es un dispositivo que normalmente incluye un giroscopio, altímetro y brújula. El giróscopo mide la velocidad de rotación, la brújula mide la orientación y las medidas de altímetro cómo es alto la multicopter desde un punto de referencia. Para el transceptor de receptor inalámbrico, o rx/tx como se llaman, puede ser cualquier módulo inalámbrico junto con un controlador. Fuimos con un módulo Bluetooth que se conecta a una aplicación de android como el controlador. Mientras que muy poco ha costado esa solución, usted necesita armar la aplicación que lo controla. Hay ejemplos disponibles en Google Play y, otra vez, Reddit es un gran recurso, pero debe asegurarse de que la aplicación y el controlador de vuelo están enviando mensajes en el mismo formato. Analizaré esto más detalladamente en una sección posterior.













