Paso 2: CES, Control de vuelo y distribución de energía

Esta sección le dará una breve descripción de cómo conectar ESCs y cómo controlar el quadcopter con salida de motor individual.
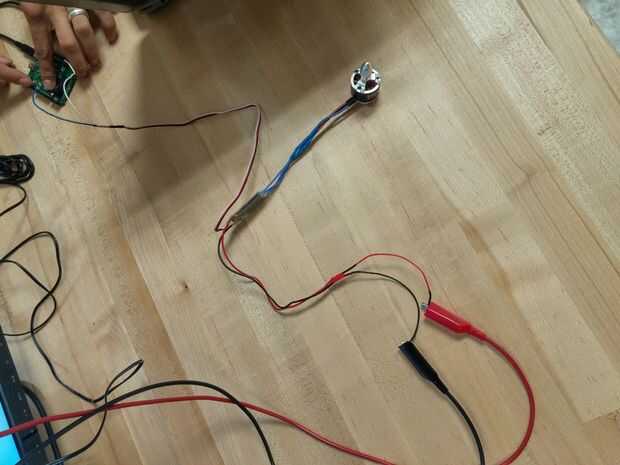
Lo primero a notar cuando se trabaja con motores sin escobillas es que hay tres líneas y las mismas son de color. No de su mercancía no es defectuosa; Esto es por diseño. El trabajo de la CES en una manera similar a un maglev; el movimiento es generado por electroimanes que interruptor de encendido y apagado a una alta tasa. El orden en que están conectadas las líneas determinará si el motor gira en sentido horario o antihorario. Y, puede invertir la dirección de la rotación al cambiar cualquiera de las dos de las líneas a la ESC.
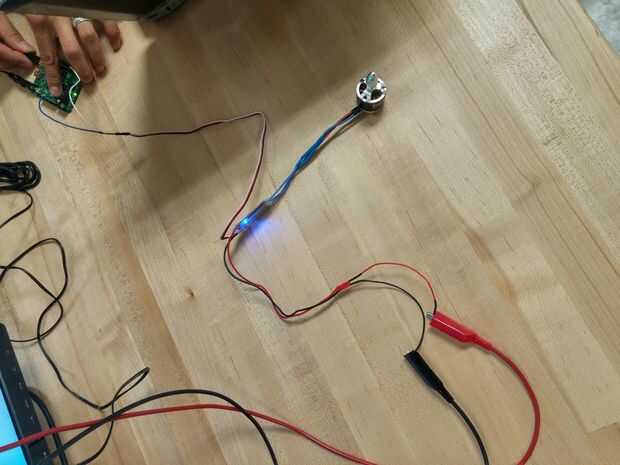
Cuando se alimentan los CES, debe haber algunos LED parpadea a un ritmo constante en cada uno. No estoy seguro de la importancia de la tasa de parpadea, tasa diferentes puede indicar diferentes niveles de carga en las células dentro de la batería, es decir, el LED parpadeará más rápido cuando la batería está baja; sin embargo, es sólo especulación.
CES están diseñados para recibir una señal de ancho de pulso modulado (PWM) en el pin de datos, el blanco uno. Generar esa señal puede ser manejado por el controlador de vuelo y modificado a través del software incluido. Si está usando un microcontrolador estándar para controlar la multicopter, entonces usted será controlar el PWM explícitamente en el código. Esto incluye el uso de timers y las interrupciones que discutir cuando esté revisando el Hydra-X PAC 5210.
Las baterías que compré fueron realmente ingeniosas:
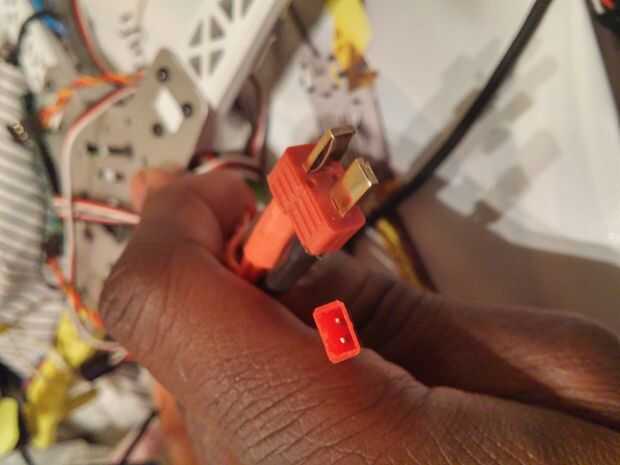
Es un pack de dos y lo tengo a la venta; Pensé que sería bueno tener menos tiempo de inactividad entre los vuelos. Lo es el universal sistema veneno con sus baterías. Mayoría de las baterías requiere un conector de 4mm bala o algo similar, pero el "sistema de clavija universal" permite el veneno baterías adaptan a dos tipos de enchufes. Dicho esto, la mayoría CES están diseñados para uso con conectores de bala. Si usted está recibiendo un kit, todos estos detalles se encargará de, pero si quieres juntar un multicopter, usted necesitará hacer una investigación adicional y asegúrese de que obtener una batería lo suficientemente grande y CES que pueden conectarse a él sin demasiados problemas. Para la mayoría, sólo necesita algunas habilidades básicas de la soldadura, aunque usted querrá asegurarse de que usted puede conseguir una conexión sólida sin utilizar demasiado la soldadura.
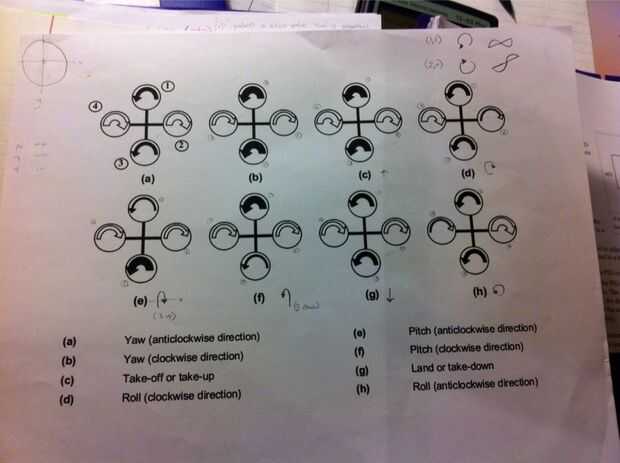
Si está utilizando un controlador de vuelo previamente construido, desvío/pitch/etc deben ya codificado en el controlador. Si usted ha decidido a diseñar su propio controlador de vuelo, la última foto da una descripción de las diferencias de velocidad entre los cuatro motores que producirán movimiento en cada eje.
Si motor 1 es del norte, el motor 2 es este motor 3 es del sur y motor 4 es del oeste, entonces:
Inclinación hacia adelante es echada = motor 3 - motor 1; es decir para mayor altura, motor 3 > motor 1
Vuelta hacia la izquierda es desvío = (motor 2 + motor 4) - (3 + motor 1 del motor); es decir motor2, motor 4 > motor 1, motor 3, respectivamente
Gire hacia la derecha es rollo = motor 4 - motor 2.
Se desea determinar la resolución mínima que provoca un cambio notable en la velocidad del motor. Para mi configuración, cambiando el ancho de pulso en milisegundos.2 era el más pequeño cambio notable.













