Paso 8: Probar la base de pan
En este punto tenemos que hablar sobre las diferencias entre servos estándar y servos continuadas.
C servos de rotación ontinuous servos que no tienen un ángulo de recorrido limitado, en cambio puede girar continuamente. Ellos pueden considerarse como un motor y caja de engranajes con controles de entrada de servo. En estos servos el pulso de entrada resulta en un número de revoluciones y las típicas 1,5 ms valor central es la posición de parada. Un valor menor debe girar el servo hacia la derecha uno superior hacia la izquierda. Wikipedia
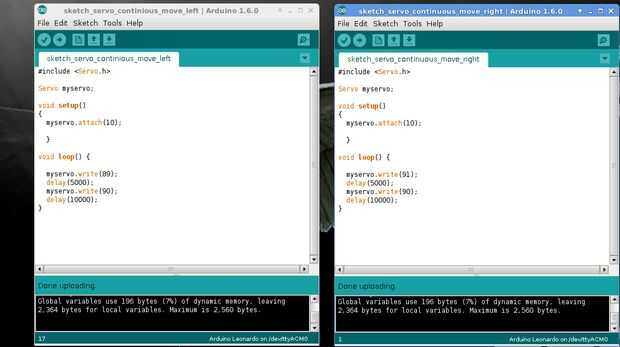
Eso significa que el mismo código de Arduino tendrá diferencias en servos estándar y continuadas. Para la bandeja de base se utilizó el servo continuo por lo que tendremos 2 bocetos para controlar el movimiento. Uno para la izquierda y uno para la rotación derecha. Otra cosa que debemos encontrar es el punto de parada o el servo. Puede utilizar este video para calibrar servo
El código para el servo de la base mueve el mecanismo de inclinación a izquierda o derecha durante 5 segundos y se detiene por 10 segundos. Si desea que el mecanismo se mueva más rápido (no lo recomiendo) cambiar el primer valor myservo.write(89). Hacer una prueba y cambiar ese valor a myservo.write(86) para ver las diferencias. El myservo.write(90) es el punto de parada del servo.
Subir el código a Leonardo a través del IDE, ver que funciona y vaya al paso siguiente para probar el código de mecanismo de inclinación.







")





