Paso 1: mecánica
Hubo algunos obstáculos mecánicos para superar al diseñar el robot. Las especificaciones para el proyecto fueron:
- El robot tenía que empujar hacia abajo y levantar un contenedor sellado para cerrar y abrir. El peso de la tapa en el recipiente no cierra el contenedor por cuenta propia.
- El proyecto debe ser muy robusto y fuerte. Tuvo que correr cientos de veces cada noche.
- El robot no debería ser ridiculamente caro para crear.
- El envase sellado no debe ser abierto completamente. Un par de pulgadas de espacio sería suficiente.
- El robot necesario para sostener la parte inferior del recipiente hacia abajo mientras levanta la tapa abierta. La fricción en el sello es suficiente para levantar el contenedor completo.
Debido a estas metas, un actuador lineal parecía una solución apropiada. Aunque lento, son muy fuertes y puede ejercer fuerza en cualquier dirección linealmente. Si no estás familiarizado con actuadores lineales, la animación que aparece abajo puede ayudar a aclarar (el GIF no puede animar si tienes el video de arriba en el medio de reproducción, incluso cuando hizo una pausa):
Más información sobre actuadores lineales aquí: http://en.wikipedia.org/wiki/Linear_actuator
Desafortunadamente, son bastante caros para comprar por cuenta propia: aproximadamente $130. También este Instructable me inspiró a crear mi propio:
Lista de piezas mecánicas:
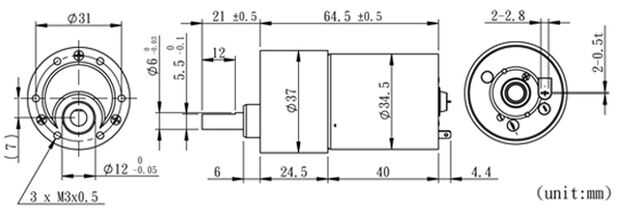
- [1] 90 RPM Motor de DC de precisión http://www.servocity.com/html/90_rpm_precision_gear_motor.html
- [1] 3/8" diámetro 0,77" eje de fijación con abrazadera http://www.servocity.com/html/0_770__clamping_hubs.html
- [1] 6mm agujero 0,77" eje de fijación con abrazadera http://www.servocity.com/html/0_770__clamping_hubs.html
- [1] aluminio montaje de Motor http://www.servocity.com/html/aluminum_clamping_motor_mount.html
- [3] 1/2 "x 36" tubos de acero cuadrados (Home Depot)
- [1] 3/8 "x 12" diámetro exterior roscado barra (Home Depot)
- [1] 1/8 "x 2" x 36 "(Home Depot) de acero plana
- [1] 1/4 "x 36" varilla de acero de O.D. (Home Depot)
- [2] 3" C-abrazaderas (Home Depot)
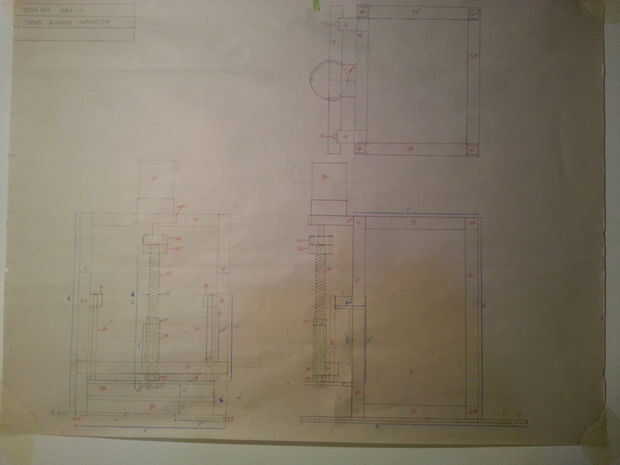
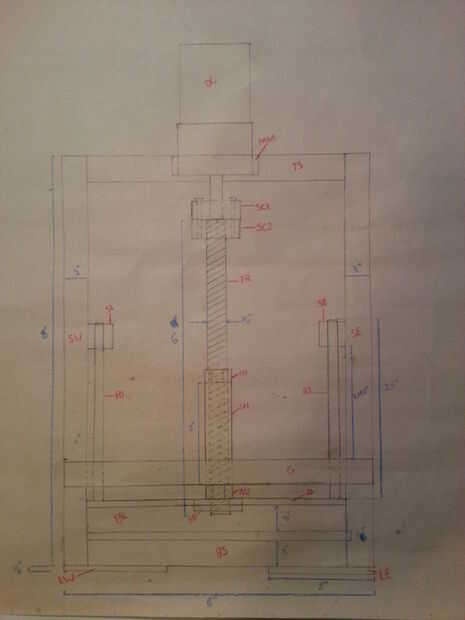
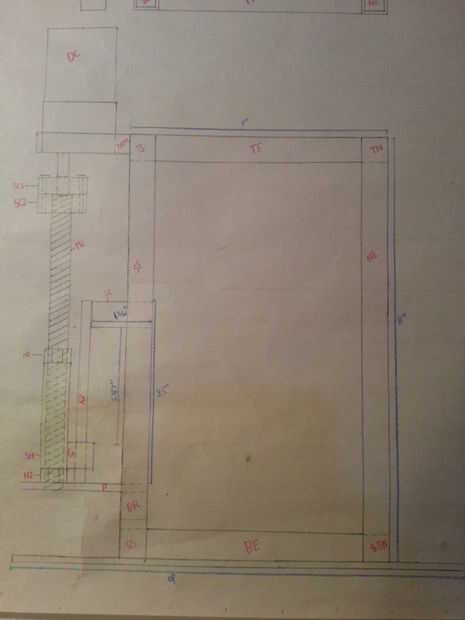
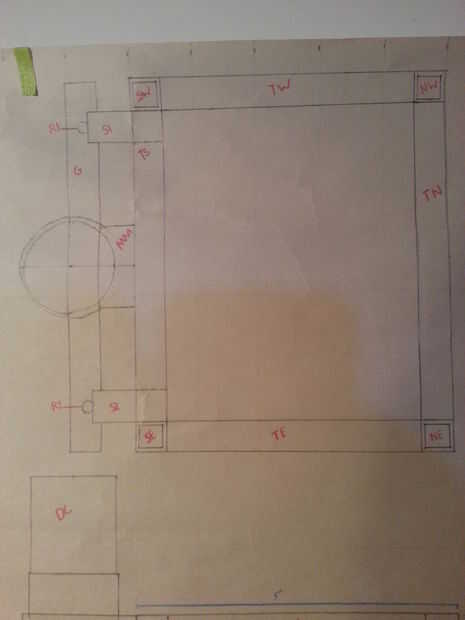
El diseño era bastante simple por lo que rompí los lápices y papel; Volviendo a mis experiencias primitivas en redacción.
Consulte el documento de proyecto para el diseño del actuador lineal. Las piezas fueron profesionalmente trabajados a máquina, soldadas y pintadas.
Rieles de guías
El eje de un actuador lineal (transporte, voy a llamarlo) debían permanecer en su lugar y no podía girar, de lo contrario la rosca nunca pasaría a través de la tuerca en el transbordador. Para que rieles fueron puestos en ejecución en el diseño. Los rieles tienen el servicio de transporte de giro. Están cubiertos de grasa para rodamientos de la rueda.
DC Motor esquema proporcionado por Servocity: http://www.servocity.com/html/90_rpm_precision_gear_motor.html






")

")
 - parte 1 - sonido y vibración acciones")
")

