Paso 3: electrónica
- (1) IOR5E ingeniería Modtronix http://www.modtronix.com/product_info.php?cPath=95&products_id=198
- (1) tablero de hija SBC28PC-IR2 RS232 http://www.modtronix.com/product_info.php?products_id=110
- (1) serie a conector Molex http://www.modtronix.com/product_info.php?products_id=103
- (2) los enchufes tipo banana
- (2) interruptores de límite de
- Caja de fusibles (1) y 500mA fusible
No son necesarios los componentes Modtronix. Aunque son piezas muy agradables, son algo caros y difíciles de interfaz con. Para la comunicación Serial: Se utiliza un protocolo de Internet de línea Serial (SLIP) para interfaz con un ordenador, que es un protocolo bastante arcaico que sólo se usa para comunicaciones seriales hoy debido a su baja carga.
Se utilizaron 12 voltios para alimentar el tablero y motor de corriente continua. El terminal de tierra era soldado directamente a la estructura metálica. El marco del proyecto de puesta a tierra lo neatens mediante la eliminación de muchos alambres. Para componentes de tierra, simplemente la soldadura o pernos a la estructura.
Alternativa a Modtronix: Arduino
Cualquier placa de microcontrolador es capaz de controlar el actuador Linear. Debe tener al menos 4 GPIO, que puede proporcionar casi cualquier microcontrolador.
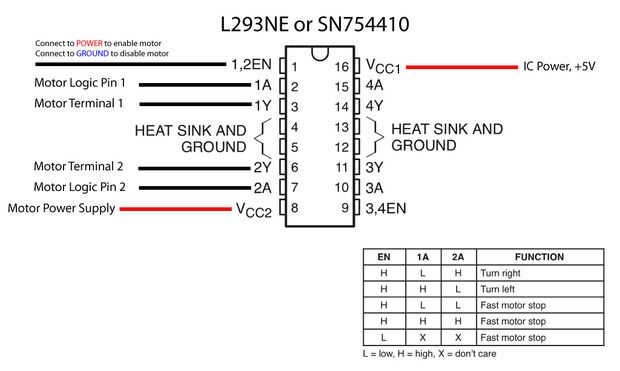
Una placa Arduino, por ejemplo, sería perfectamente aceptable para el control del actuador lineal; usted tendrá que construir un puente en H. Para construir un puente en H apropiado para un Arduino, siga Instructable de este caballero:
La ventaja de la Junta de Modtronix es que está bien equipada con relés, haciendo el proyecto general limpiador desde el desarrollo de un tablero separado no era necesario. Los relés son capaces de manejar altos voltajes y corrientes. Una segunda ventaja de la Modtronix es que vino en su propio estuche de plástico; Además de poner en orden el proyecto.
Interruptores y fusibles
Interruptores de límite se utilizan para detectar cuando la caja tiene completamente cerrado y abierto. Estos fueron por cable desde el conector de 5V en el tablero de Modtronix al borne positivo de las entradas Opto. Las entradas Opto negativos fueron a tierra.
Una entrada del Opto es un diferencial de entrada con un terminal positivo y un terminal negativo. El polo negativo es el voltaje de referencia al terminal positivo. Una diferencia de voltaje de 3 voltios positivos o superior producirá un alto a esa entrada del Opto.
Para implementar un interruptor de límite en un Arduino, puede conectar uno de los pines del interruptor límite de poder de 5V y luego que se alimentan las entradas. Programar el Arduino para detectar cuando eso Perno alto y desactivar el puente H en ese momento.

Todavía era una cuestión a tener en cuenta. Los interruptores de límite son relativamente débiles al resto del robot y probablemente sería el primero en fallar. Si esto fuera a suceder, entonces el motor de la C.C. Nunca deje de girar porque el interruptor no viaje la entrada Opto. Esto podría causar que falle el Motor. Por lo tanto, es necesario un fusible.
Con un multímetro, un amperaje de 300 mA se consumía mientras que el motor de la C.C. está bajo condiciones normales de funcionamiento. En la Página Web de Servocity, el puesto actual es a 1 amperio. El valor del fusible que elegí fue 500mA. Esto fue atada con alambre en serie con la fuente de tensión.






")

")
 - parte 1 - sonido y vibración acciones")
")

