Paso 2: La junta placa soporte
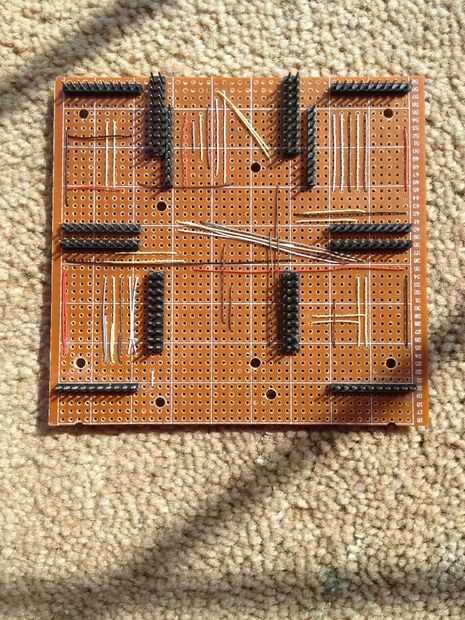
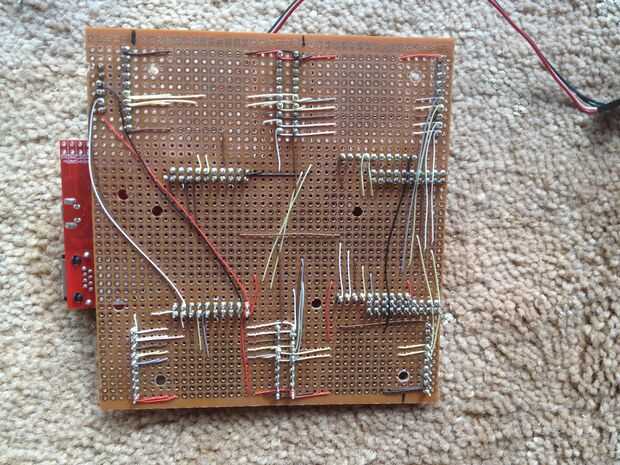
Las fotos muestran mi tablero de interconexión wire-wrap para conectar y apoyar mecánicamente hasta cinco tarjetas adicionales de refuerzo-DRV8711.
Mantenga todo el 5" ancho de la placa de prototipo. En mi tablero de arriba, había recortado la Plaza de la Junta, pero puede que desee mantener algunos longitud adicional para prever área de extensión con conectores adicionales y componentes. Componentes, excepto los pernos no son necesarios pero puede haber muchas características útiles y pines del conector que se podrían agregar a la tabla. Volví a añadir un conjunto de pines a mi placa para el módulo de relé de Arduino compatible 2.
He añadido pins para ambos conectores BoosterPack para soporte mecánico, pero descubrí que ser innecesaria. El LaunchPad es bien apoyado por solo 40 pines y puede añadir soporte de tornillo 4-40 con espaciadores de 7/16" como los agujeros de diámetro de 1.8". Sólo alambré BoosterPack 2 pero podría recoger las señales de ambos BoosterPack. Utilizando BoosterPack 2 en la posición de jerarquizada permite el LaunchPad compensar el BoosterPack 1 conector. También puede omitir la quinta posición de la BOOST-DRV8711 en el centro superior del tablero si usted no va a utilizarlo.
Rellenar el conector de 2 BoosterPack μP con 2 pedazos de la breakaway Sullins PBC36DACN y rellenar sus tablas DRV8711 impulso cada con 2 pedazos de la breakaway Sullins PBC36SACN. Coloque los componentes como se desee en la placa de prototipo y de la soldadura de los pernos en su lugar. Los tableros celebrará los pernos rectos mientras que la soldadura. Quitar ahora las tablas y poner en guardar lugar mientras envoltura de alambre.
Mayoría de las máquinas se necesita menos potencia relés - uno para la alimentación del motor paso a paso y otro para el motor. Puede utilizar módulos de relé de Grove con la comodidad de un cable precableado, pero prefiero el placas de módulo de relé 2 compatible con Arduino. Son un poco más pesado con relés de 5 voltios en lugar de 3 voltios y tienen mayor energía terminales de tornillo. Nota: los relés de Grove cada usan una salida alta activa bipolar típico, pero para las 2 tarjetas de módulo de relé debe configurar el salidas colector abierto bajo activo.
Use los módulo de relé 2, agregar una fila de 5 pernos a un borde expuesto de la placa y cable a B1 (+ 5 voltios) y B2 (masa) del conector BoosterPack más cercano. También alambre dos GPIO salidas a las entradas de dos relé. He utilizado B9 y B10. ¿Por qué cinco pernos cuando sólo necesita utilizar cuatro? Para evitar invertir energía si el conector no polarizado está conectado al revés.
Ahora Conecte los pernos comunes requeridos para todos los puestos de refuerzo-DRV8711 a partir de la posición de piggy-back. Aunque no es necesario, la última posición a posición de piggy-back inalámbrico será efectivamente acortar la longitud de trayectoria de la señal y aumentar la frecuencia de reloj máxima de cambio. Los pasadores que deben ser conectados en común son:
Requiere pernos comunes:
- A1 - suministro de 3,3 voltios
- A7 - reloj de cambio
- A8 - reset
- D1 - tierra
- D6 - datos Serial (SDI) o Master fuera esclavo en (MOSI)
- D7 - datos en serie a (SDO) o Master en esclavo hacia fuera (MISO)
Chip Select Pins:
Ahora discretamente alambre el pin de chip select que posiciones D10 para cada uno de los DRV8711 de impulso adicional a un sin usar pin en el conector BoosterPack. He asignado pines por defecto en RiceCNC, pero se puede cambiar la asignación. Pernos más se pueden utilizar, incluyendo pernos capaces análogos, pero puede que desee utilizar una asignación de pin que no se entre en conflicto con un Grove Base BoosterPack en el mismo conector. Utilicé las siguientes asignaciones de pines:
- Posición 1 - C7
- Posición 2 - C8
- Posición 3 - D9
- Posición 4 - C10
- Posición 5 - D4
Pin de salida analógica potenciómetro - A2
Este impulso-DRV8711 potenciómetro análoga está relacionada con funciones motoras y tiene poca utilidad para esta aplicación ya que las macetas normalmente es inaccesibles. Además, si por cable, las entradas analógicas pin entrarían en conflicto con las entradas analógicas de una Base de Grove en el mismo conector BoosterPack. Sugiero que omitir este paso pero si desea utilizar las macetas alambre discretamente el pin A2 de cada posición de DRV8711 impulso adicional a un pasador capaz análogo BoosterPack B3 a través de B8.
nSleep - A6
La clavija de entrada de nSleep de DRV8711 de impulso debe ser alta para los chips de 8711 controlador debe estar habilitada. El firmware del μP celebrará este pin alto para la posición de piggy-back. Para cada posición adicional, puede cable de la patilla de la A6 en común con los demás o alambre directamente a 3,3 v - A1.
Sin embargo usted puede sacar este pin en un conector y utilizar una resistencia de pull-up KΩ 1 a 3, 3V. Un interruptor a tierra proporcionará un alumbrado para quitar tenencia actual del motor. Esto sería útil para los usuarios que prefieren hacer un ajuste fino girando el eje del motor directamente a mano.
- Paso - A9
- Dirección - A10
El impulso-DRV8711 acepta paso y dirección de control de movimiento de pines de entrada y del comando SPI. El firmware del μP RiceCNC controles de movimiento para todas las posiciones utilizando sólo la conexión en serie y tiene estos pines bajo para la posición de piggy-back inalámbrico. Como con nSleep, puede este pin de alambre en común o elctronico directamente a masa D1.
Sin embargo usted puede sacar estos pines en un conector y use un resistor de pull-down 1 KΩ a tierra para evitar entradas flotantes. Este conector entonces permitiría control de software de control de movimiento que no sea RiceCNC. RiceCNC todavía podría ser utilizado para configurar los registros de parámetro 8711 y monitorear el estado del controlador pero RiceCNC no serán capaces de realizar un seguimiento de la posición del motor o cambiar el par de velocidad constante, aceleración o desaceleración. Se aplicaría solamente a la explotación actual. Nota: par variable es una característica adicional de RiceCNC y no directamente apoyado por el 8711.
Nota: RiceCNC está trabajando en añadir soporte para un modo de operación de "esclavo". En este modo paso y dirección las señales desde otro sistema de control de movimiento se podrían entrar a la Junta del μP y no directamente a los conductores. RiceCNC será entonces capaz de pista la posición para la entrada remota y ajustar el par actual de aceleración, deceleración, velocidad constante y celebración.
- Bin1 D8
- D9 Bin2
Estos pines se utilizan sólo para el modo de control de motor DC dual actualmente no RiceCNC. Están reservados para uso futuro y es generalmente preferible para conectar sin usar los pines de entrada para la tierra en lugar de dejar que el flotador de entradas. Como con los pasadores de paso y dirección, estos pines pueden con cable en común o con cable a tierra D1.










 por galés Jason")

")
