Este proyecto comenzó con un robot muerto que queríamos traer de vuelta a la vida. Si he aprendido algo de Bender, que allí es una mejor manera de rejuvenecer un robot que lo abra algunas botellas de cerveza.La tarea de controlar un robot que interac
[código]#include / / servo kütüphanesi eklendi. Bu önemiconst int isaret_parmak = A0; //işaret parmağının datası A0 pininden okuncak. const int orta_parmak = A1; Orta "" A1"" const int yuzuk_parmak = A2; Letras de Yüzük "" A2
para Feria de Ciencias este año, sentí como algo en vez de hacer un experimento. Todo lo que necesitaba hacer era mirar alrededor Instructables para una idea de proyecto. Me inspiré por mano robótica de njkl44 desde que recuerda mucho de cosas de pel
En esto nos hemos propuesto a un humanoide multipropósito sistema de que podría ser útil en muchos usos incluyendo defensa, vigilancia y cualquier entorno de trabajo peligroso. Para tener imitaciones exactas del cuerpo humano movimientos que hemos ut
Estoy trabajando en un robot andante bionic mucho. Ya se acerca la Navidad, este robot está diseñado como un alce.Este artículo presenta este robot y las maneras de controlarla. El análisis de la marcha se optimizan mediante el análisis de la cinemát
This is an instructable on building a relatively low-cost wheeled robot platform for developing ROS applications. Pensar en ROS como un sistema operativo para tu robot (proporciona la abstracción del hardware, controladores de dispositivo, biblioteca
esta piel textil se diseña para estirar sobre una extremidad robótica para detectar intensidad de presión, así como lugar de contacto en toda su superficie. rSkin fue encargado por Ian Danforth que ayudaron también a fondo el Bilibot, una plataforma
KeerBot objetivo es desarrollar robots de hardware abierto – una nueva!No más regular aburrido robot que rueda en el suelo, pero un nuevo robot que puede dibujar en las paredes.El robot se cuelga de dos cables con longitud inicial conocida y tiene un
Estaba tratando de diseño que un Bo-robot basado en plataforma miniQ. Gracias a la tecnología de impresión 3D, puedo imprimir un caso biónico de alta calidad y ligereza en un bajo costo.Paso 1: Materiales y herramientaspara el material completoPaso 2
Compañero de cama es una cama de robot autónomo que busca nuevos contratos. En otras palabras, he robotizado mi cama personal para socializar y compartir de sí mismo con otros.Tal vez un poco más de una explicación está en orden. Un acompañante puede
Mikey el Robot "ve la rana" utilizando el sistema de visión de cámara de Pixy. Pixy cuesta alrededor de $70. y fácilmente interfaces con un cable incluido para Arduino. Pixy puede ser "entrenado" para reconocer hasta siete colores dife
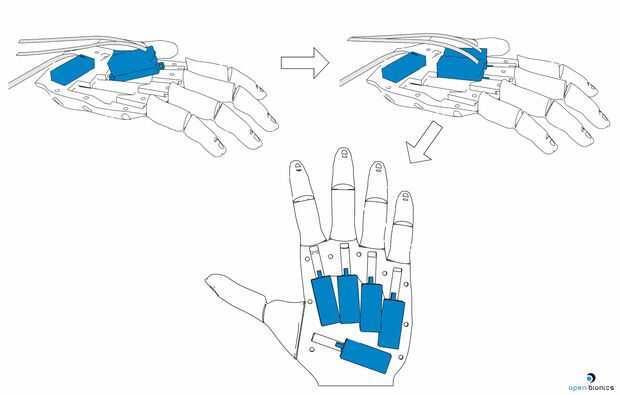
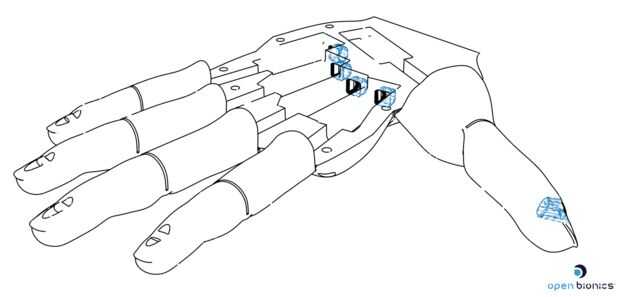
aquí le damos una mano de robot de músculo artificial que eventualmente podría ser utilizada como un reemplazo protésico de una mano humana. Los "huesos" son 3d impreso en PLA y los músculos artificiales de goma de silicona y piel fueron emitido
He diseñado este proyecto para un taller de 10 horas de ChickTech.org cuyo objetivo es introducir a las mujeres adolescentes a los asuntos de la madre. Los objetivos de este proyecto fueron:Fácil de construir.Fácil de programar.Hizo algo interesante.
ACTUALIZACIÓN: Permite hacer Robots, mi hogar digital hackerspace, fue comprado por RobotShop. No quiero entrar, pero los nuevos propietarios prohibición yo y la mayoría de los miembros veteranos. Dijo la mayoría de los enlaces allí estará rota. Por





")

")





