Paso 5: Colocar la cubierta posterior
Antes de monta la cubierta trasera, necesitamos fijar los insertos roscados.
Se necesita:
- Asamblea de Palma con motores y PCB
- 3D impreso tapa trasera
- 13 insertos de empuje x M3 roscado
- 9 pernos de x M3
- Pinzas
- Soldador (usada para las inserciones de empuje)
- Llave Allen m3
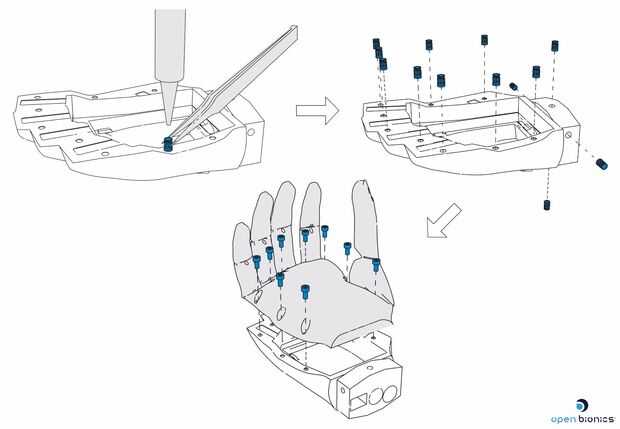
Insertos para roscado empuje
- Calentar el soldador a alrededor de 220° C - 260° C
- Uno de los insertos roscados usando las pinzas, coloque sobre uno de los agujeros en la tapa trasera
- Los insertos roscados con el soldador de calor
- Presione suavemente sobre los insertos con la punta del soldador para pulsarlos en el plástico, hasta la parte superior de la estufa quede al ras con la superficie de la parte
- Continúe este proceso para todos 9 insertos en la tapa trasera y los 4 insertos en la muñeca
Montaje de la cubierta posterior
Con todos los insertos de roscado empuje montados en la cubierta posterior, ahora necesitamos unir a la Asamblea de Palma.
- Coloque la tapa en la parte posterior de la palma para que los orificios para los tornillos en la parte posterior cubren línea con los orificios de la palma (nota, puede que necesite doblar el pulgar y los dedos para la contraportada de asiento correctamente)
- Con la tapa trasera en su lugar, mirar a través de los agujeros del conector de muñeca para confirmar las 3 conexiones en la almendra línea del tablero para arriba con los agujeros en la muñeca y son accesibles
- Coloque los tornillos M3 a través de los agujeros de 9 perno en la palma y pernos en los insertos roscados en la tapa trasera
- Si las inserciones rechinan como tornillo en ellos, esto significa que hay algún plástico derretido en las roscas del inserto roscado. Para esto que tendrá que apretar un par de vueltas, entonces les afloje ligeramente y repetir este proceso hasta que el perno esté lo suficientemente apretado
Ahora debería tener algo empezando a parecerse a una mano robótica, el siguiente paso es cargar algún firmware de prueba en el PCB para los motores se extienden para unir los tendones del dedo.





")

")





